...
- 打开GetPowerStatus工程,右键get_power_status, 将此工程设置成StartUp project
右键get_power_status, 打开属性选项,将Slamware SDK 的include目录和lib目录添加到工程
Slamware SDK的include和lib目录无需复制到参考例程目录,只需在Visual Studio里指定路径即可。

- 右键get_power_status, 在Debugging页面中command Arguments处输入 192.168.11.1
格式说明:get_power_status <IP address>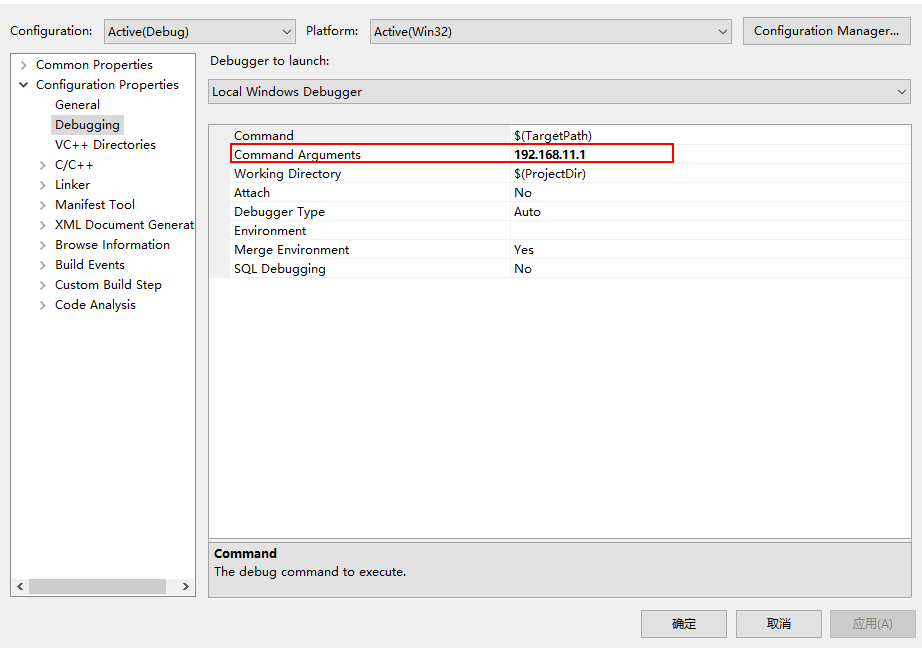
- 点击F5运行
- Console输出为

...
代码描述
获取电量/充电状态
获取电量/充电状态
1
2Code Block
3language
4java
5theme
6Midnight linenumbers 78910111213141516SlamwareCorePlatform sdp = SlamwareCorePlatform::connect(argv[1], 1445);std::cout <<"SDK Version: "<< sdp.getSDKVersion() << std::endl;std::cout <<"SDP Version: "<< sdp.getSDPVersion() << std::endl;PowerStatus status = sdp.getPowerStatus();std::cout <<"Battery Percentage: "<< status.batteryPercentage << std::endl;std::cout <<"is Charging: "<< status.isCharging << std::endl;std::cout <<"is DC connected: "<< status.isDCConnected << std::endl;if(status.dockingStatus == DockingStatusNotOnDock)std::cout <<"Docking status: Not on dock"<< std::endl;elseif(status.dockingStatus == DockingStatusOnDock)std::cout <<"Docking status: On dock"<< std::endl;elsetrue /* 与底盘连接 */ AbstractSlamwarePlatform robotPlatform = DeviceManager.connect("10.0.130.71", 1445); /* 获取版本信息 */ sdkVersion.setText(robotPlatform.getSDKVersion()); try { /* 获取Slamware ID */ deviceID.setText(robotPlatform.getDeviceId()); /* 获取电源状态相关信息 */ PowerStatus powerStatus = robotPlatform.getPowerStatus(); /* 是否正在充电 */ if(powerStatus.isCharging() == true) { chargingStatus.setText("正在充电"); } else { chargingStatus.setText("未在充电"); } /* 是否DC connected */ if(powerStatus.isDCConnected() == true) { dcConnected.setText("已连接"); } else { dcConnected.setText("未连接"); } /* 剩余电池电量 */ batteryPercentage.setText(powerStatus.getBatteryPercentage() + "%"); /* 是否回到充电桩 */ if(powerStatus.getDockingStatus() == DockingStatus.OnDock) { dockStatus.setText("已回桩"); } else if (powerStatus.getDockingStatus() == DockingStatus.NotOnDock) { dockStatus.setText("未回桩"); } else { dockStatus.setText("未知状态"); } /* 睡眠状态 */ switch (powerStatus.getSleepMode()) { case Awake: sleepMode.setText("Awake"); break; case WakingUp: sleepMode.setText("WakingUp"); break; case Asleep: sleepMode.setText("Asleep"); break; case Unknown: sleepMode.setText("Unknown"); break; default: break; }std::cout <<"Docking status: Unknown"<< std::endl;