...
- Slamware SDP mini
- Slamware SDP
- Slamware 套装 (基于Slamware导航方案的用户机器人系统)
- Zeus/Apollo等底盘系统
例程下载
编译运行
- 打开samples工程,右键move_to_spot, 将此工程设置成StartUp project

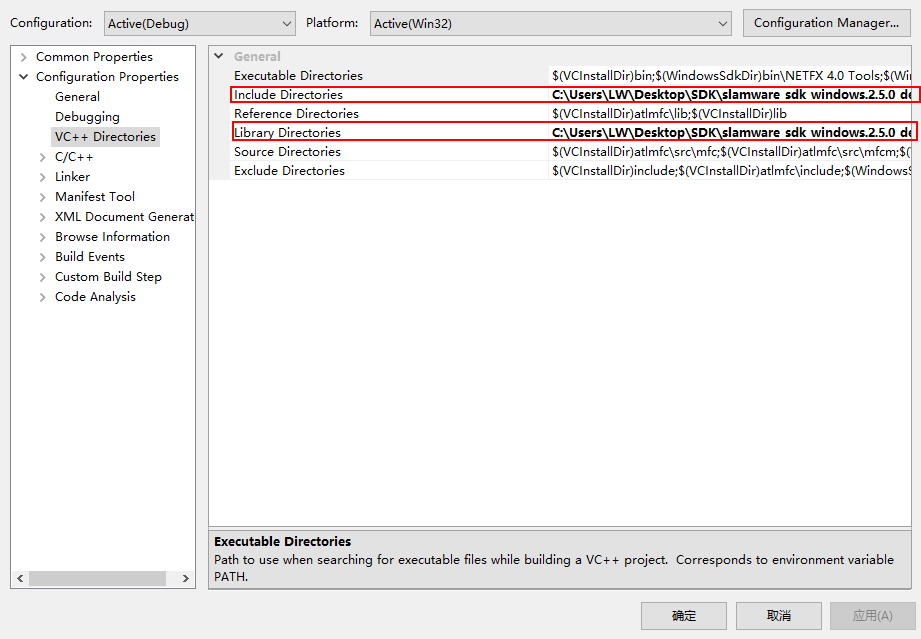
右键move_to_spot, 打开属性选项,将Slamware SDK 的include目录和lib目录添加到工程
Info Slamware SDK的include和lib目录无需复制到参考例程目录,只需在Visual Studio里指定路径即可。
- 右键move_to_spot, 在Debugging页面中command Arguments处输入 192.168.11.1
格式说明: move_to_spot <IP address>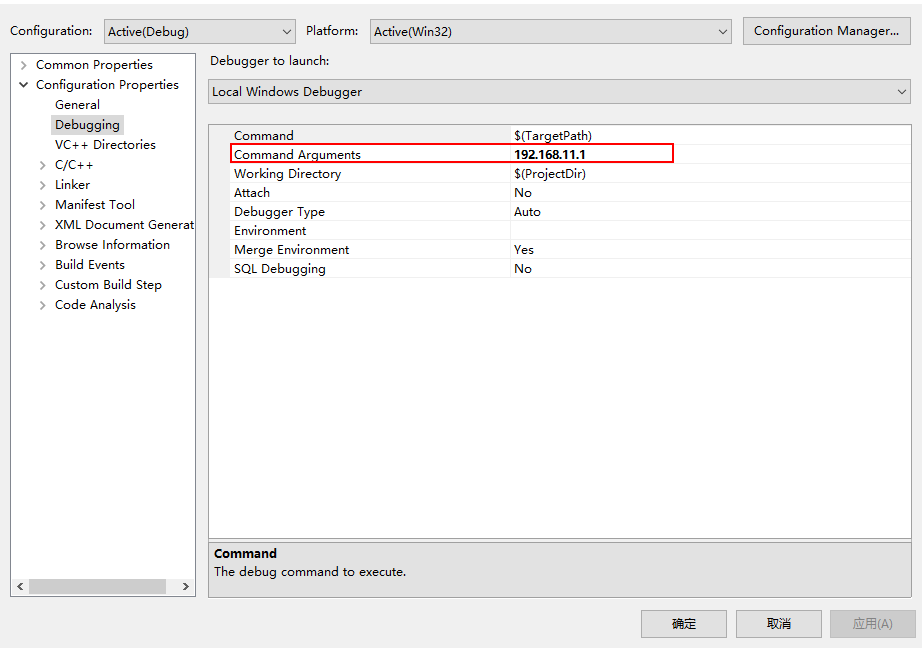
- 点击F5运行
- 可以连上Robostudio查看地图及机器人的运动
Multimedia name bandicam 2018-01-30 15-29-41-992.mp4
- 打开samples工程,右键move_to_spot, 将此工程设置成StartUp project