本页介绍了Recoverlocalization的用法, 如何调用recoverlocalization()接口使机器人在地图上重新定位正确的位置。在使用这个功能之前,请注意以下几点:
本页内容
运行环境准备
软件平台
- Visual Studio 2010 SP1
- Slamware Windows SDK:Slamware Windows SDK
- RoboStudio(用于显示地图):Robostudio installer
Sample Code:
使用更高版本的Visual Studio可能会带来编译异常。
使用Visual Studio 2010(无SP1)可能会因为无法与.Net Framework兼容而报编译错误,此时增加SP1更新包即可解决问题
硬件平台
(以下任选其一)
- Slamware SDP mini
- Slamware SDP
- Slamware 套装 (基于Slamware导航方案的用户机器人系统)
- Zeus/Apollo等底盘系统
例程下载
编译运行
- 打开samples工程,右键Speed regulation, 将此工程设置成StartUp project

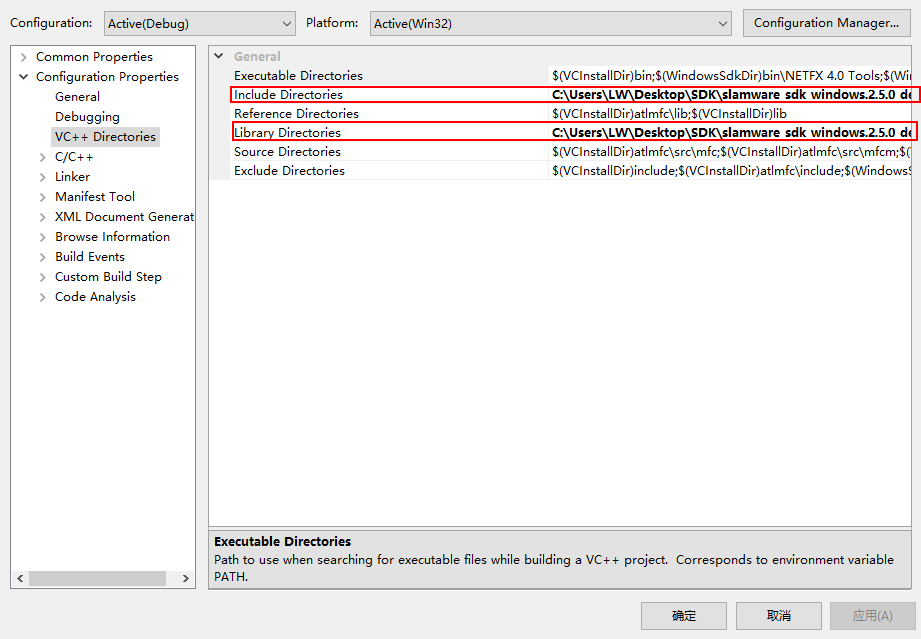
右键Recover_Localization, 打开属性选项,将Slamware SDK 的include目录和lib目录添加到工程
Slamware SDK的include和lib目录无需复制到参考例程目录,只需在Visual Studio里指定路径即可。
- 右键Recover_Localization, 在Debugging页面中command Arguments处输入 192.168.11.1
格式说明:rotation_action_demo <IP address>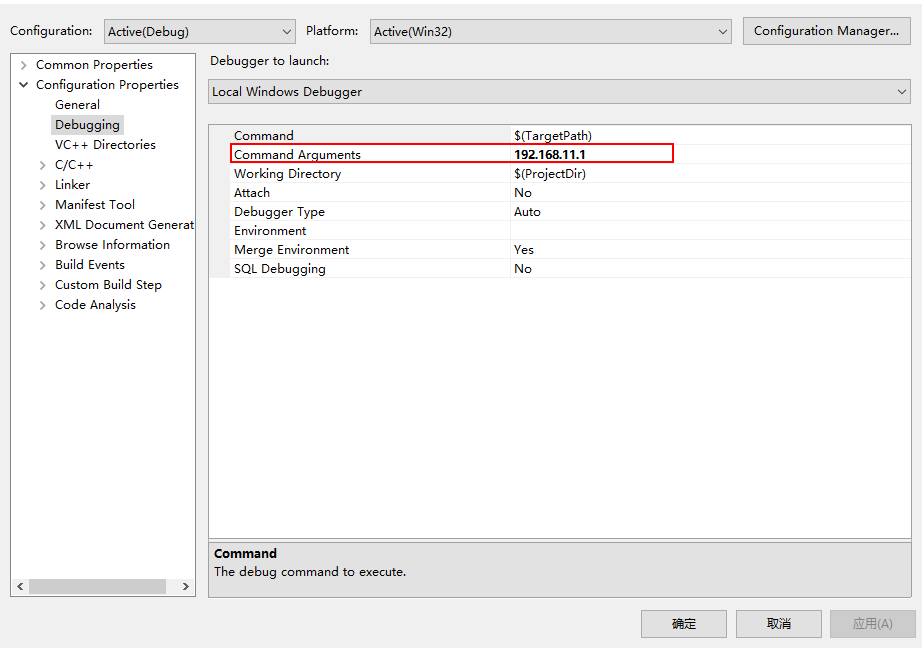
- 点击F5运行
- 可以连上Robostudio查看地图及机器人的运动
代码描述
该程序能够使偏离地图实际位置的情况下在
地图重定位SlamwareCorePlatform sdp = SlamwareCorePlatform::connect(ip_address, 1445); std::cout <<"SDK Version: " << sdp.getSDKVersion() << std::endl; std::cout <<"SDP Version: " << sdp.getSDPVersion() << std::endl; rpos::actions::MoveAction action = sdp.getCurrentAction(); if (action) action.cancel(); //recoverlocalization in a default area--20mX20m square action = sdp.recoverLocalization(rpos::core::RectangleF(0,0,0,0)); //recovarlocalization in a defined area. //rpos::core::Location location = sdp.getLocation(); //rpos::core::RectangleF area(location.x()-1,location.y()-1,2,2); //RecoverLocalizationOptions rloptions = RecoverLocalizationOptions(); //action = sdp.recoverLocalization(area/*,rloptions*/); while(true) { switch (action.getStatus()) { case rpos::core::ActionStatusError: std::cout << "Action Failed: " << sdp.getCurrentAction().getReason() << std::endl; break; case rpos::core::ActionStatusRunning: std::cout <<"Current status: Running" << std::endl; break; case rpos::core::ActionStatusFinished: std::cout <<"Current status: Finished" << std::endl; break; default : std::cout <<"default" << std::endl; break; } }