SLAMWARE本页面包含了关于SLAMWARE SDP Mini 的介绍,技术指标及简单用法。
本页内容
| Table of Contents | ||||
|---|---|---|---|---|
|
简介
概述
SDP Mini 为思岚科技自主研发的一款迷你型机器人评估开发平台,它包含了SLAMWARE核心模块、激光雷达、里程计等核心要件,是实现SLAM方案的最小系统。该平台适用于对SLAMWARE室内导航定位解决方案进行初步评估,同时也可满足对导航定位有简单功能需求的高端玩具类或娱乐型机器人开发的需要。
该平台系思岚科技自主研发,内置SLAMWARE自主定位导航解决方案核心模块及RPLIDAR A2激光雷达,同时内置的 SLAMWARE扩展板Breakout3.0引出了核心模块所有主要接口供用户自行直接取用或配置;该平台仅依靠5号电池即可正常驱动,简单方便,灵活高效。
该平台提供的SDK支持在Windows、Linux,IOS和Android环境下使用,集成了核心的SLAMWARE 室内定位导航解决方案,同时预留多种传感器接口供用户自行评估开发。
客户仅需根据自身设计需求添加相关传感器及其他配置即可开发出带有简单自主定位导航功能的机器人。
核心要件

SLAMWARE Core Lite 自主定位导航解决方案核心模块(简称SLAMWARE核心模块)
基于RPLIDAR提供实时定位和自主导航功能,同时支持串口和以太网交互导航信息。具体规格信息请参考KBSW180102 SLAMWARE Core 数据手册。
SLAMWARE Breakout 3.0
SLAMWARE核心模块扩展板,用于提供可直接和A1/A2 雷达,网络,PC,电机及各种传感器等连接通讯的接口,方便用户基于该核心模块进行相关硬件或软件开发。
RPLIDAR A2
用于实现二维平面内一定范围内的360度全方位激光测距扫描,实时产生的所在空间平面点云地图信息可由SLAMWARE核心模块用于实现实时定位和自主导航功能。
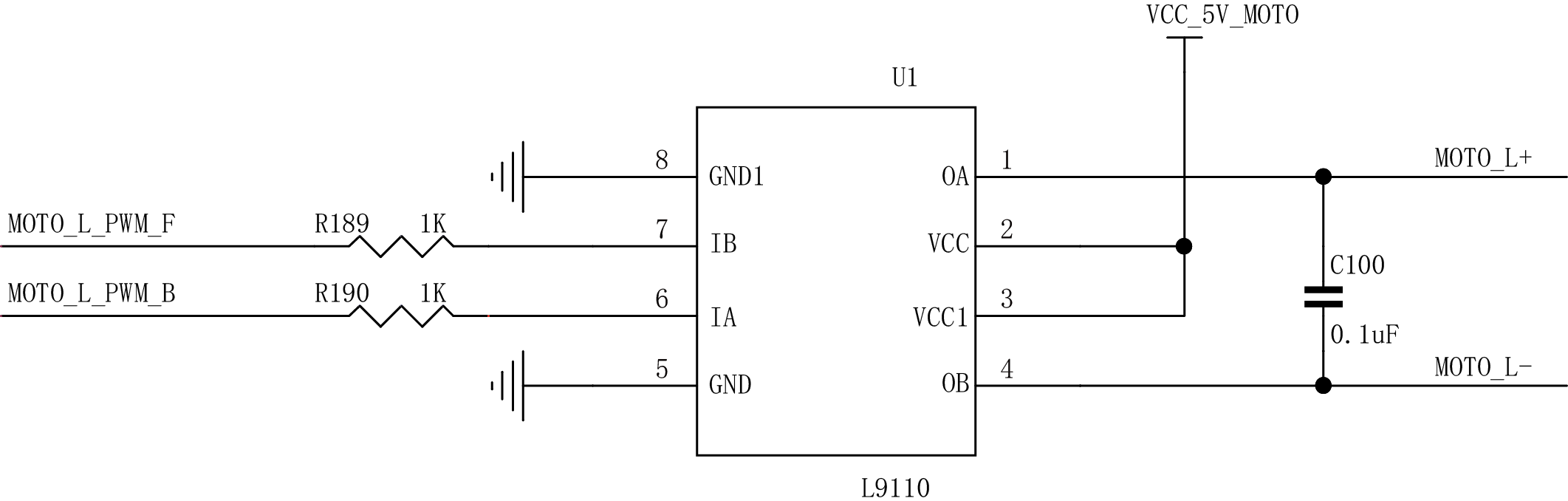
驱动电机
SDP Mini配置有有刷电机,它启动快,制动及时且控制电路相对简单,便于用户进行快速调节及改良,其电路原理图如下:
规格参数
项目 | 指标 | 参数 |
|---|---|---|
尺寸与质量 | 最大直径 | 185 mm±5mm |
高度 | 100 mm±5mm | |
净重 | 0.85kg ±0.05kg | |
材质 | 亚克力(上层面板4mm/下层面板5mm) | |
重心 | 高度 | 47mm |
位置 | 圆心向后5mm | |
RPLIDAR A2性能 | 最大扫描半径 | 8m(90%反光率表面) |
地图构建 | 地图分辨率 | 5cm |
最大建图面积 | 视具体使用环境及电池容量 | |
运动性能 | 行走速度 | 0.25m/s |
最大行走速度 | 0.35m/s | |
接口 | 硬件接口 | Breakout 3.0 所有接口,详情可参考SLAMWARE 套件使用手册中“相关接口”章节了解详情。 |
软件接口 | SLAMWARETM Windows/Linux/Android/IOS SDK | |
功耗和供电 | 工作电流 | 0.7A |
连续工作时间 | 2h | |
电源 | 8节5号电池 | |
工作环境要求 | 温度 | -10℃ ~ 40℃ |
湿度 | 30% ~ 70% |
使用方法
图形界面工具
Robot Studio
SLAMWARE 设计有Robot Studio,一款极为友好的电脑端图形界面工具,涵盖了SLAMWARE解决方案的绝大部分功能操作,用户使用该工具连接至设备,即可对设备进行建图,运动,导航等一系列操作。
了解Robot Studio功能,请参考KBSW180113 Robot Studio RoboStudio User Manual。
SLAMWARE Web Portal
在开发、调试及使用SLAMWARE设备的过程中,有时候需要对设备进行一些操作,如查看基本信息,更新版本,配置WiFi,可视化诊断等,通过Web Portal管理后台即可方便地进行这些操作。
当前该管理后台可支持的操作包括:
- 查看设备信息
- 重启模块
- 更新固件
- WiFi配置
- 开启SLAMWARE Core诊断模式
- 修改管理员密码
请参考KBSW180153 SLAMWARE Web Portal Function Overview 1了解该管理后台所有功能及使用方法。
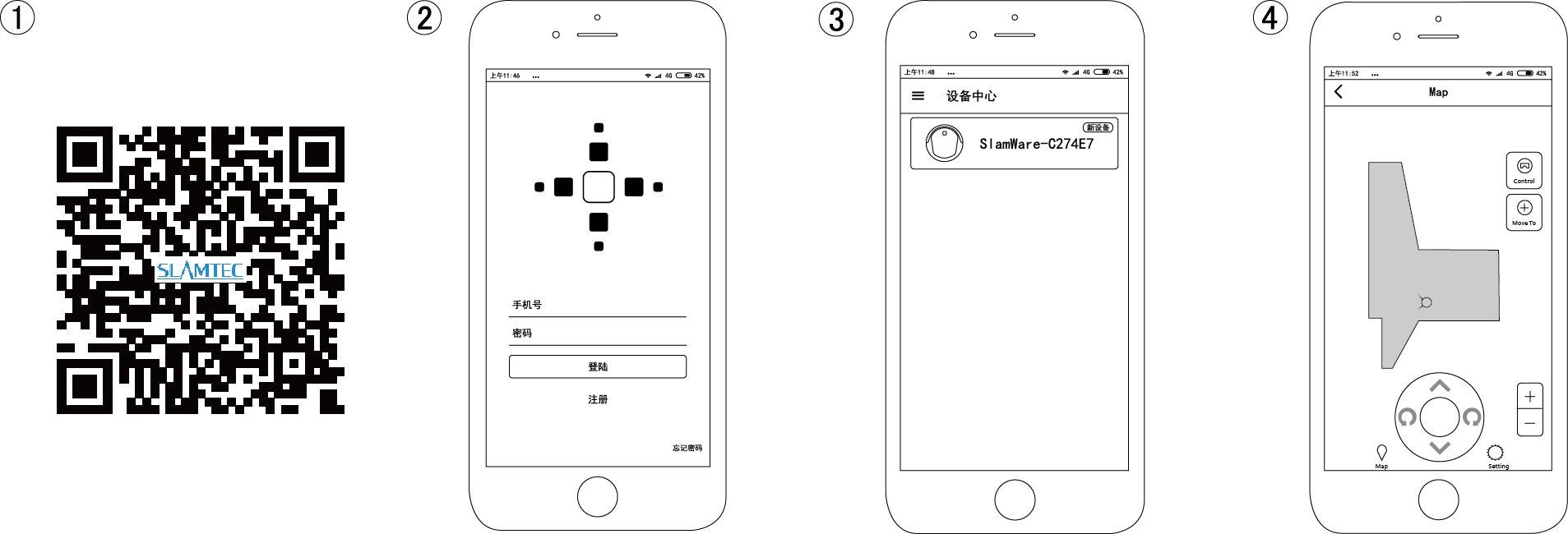
手机应用程序
SLAMTEC设计有可分别运行在ios和Android设备上的应用程序,涵盖了定位导航机器人所需要的基本建图和运动控制功能,添加好需要操控的设备即可对设备进行一系列控制,方便用户对解决方案进行评估和调试。
| Note |
|---|
|
其他
Slamware Console
Slamware Console是配套Slamware解决方案使用的一个命令行开发工具。这个工具的主要用途是调试您底盘的Control Bus协议实现是否正确。同时也可以用来诊断您的底盘上的各个传感器的状态,以及里程计和轮子的数据。请参考KBSW180110 Slamware Console 用户手册了解详情。
slamware_config_tool
底盘配置工具slamware_config_tool可以设置底盘大小,轮距,自动回充等参数,详情请参考KBSW180147 机器人底盘传感器位置坐标及底盘配置工具的使用。
开发参考
Ctrl Bus
关于外部系统将如何通过Control Bus 协议与底盘进行通讯,请参考KBSW180104 SLAMWARE Control Bus 通讯协议。
SDK API Reference
关于Windows平台开发SLAMWARE SDK的API参考介绍,请参考KBSW180105 SLAMWARE SDK API 参考(Windows);
关于SLAMWARE SDK 中坐标系及地图数据类型的介绍,请参考KBSW180143 关于SLAMWARE SDK中坐标系统以及地图数据的概述;
关于机器人底盘电机里程计的介绍,用法和代码示例,请参考KBSW180145 基于Slamware解决方案的服务型机器人底盘电机里程计概述及代码示例;
关于如何使用SLAMWARE SDK实现机器人的运动控制及其返回状态判断,请参考KBSW180167 使用Slamware SDK实现机器人的运动控制及其返回状态判断
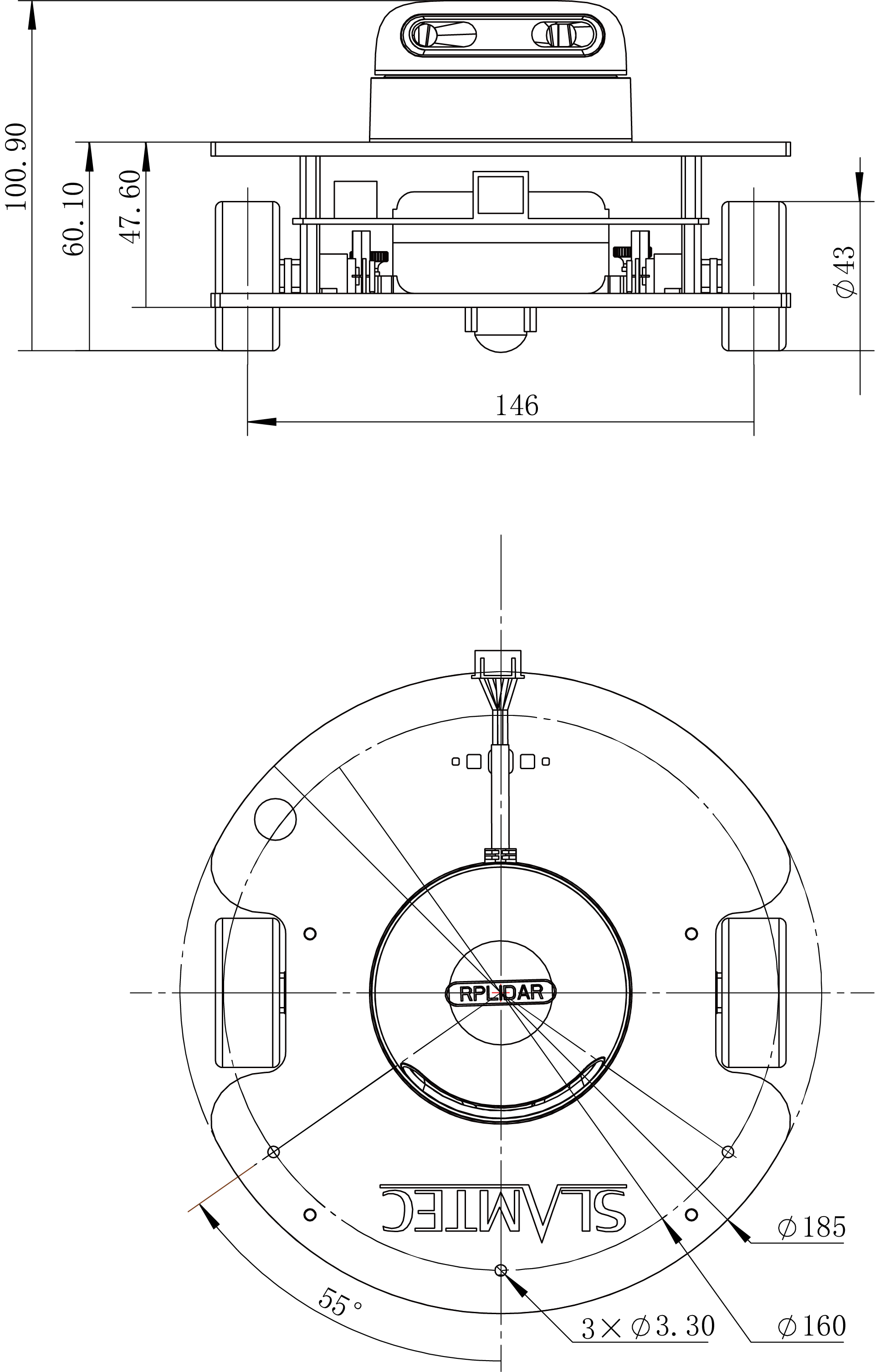
机械尺寸
FAQ
指示灯说明
Breakout指示灯颜色及状态所标识的含义各是什么?
指示灯 状态 含义 D1 亮红色 Breakout 3.0上电 SLAMWARE Core的指示灯 亮绿色 SLAMWARE Core上电 U6 蓝色闪烁 正在启动中 蓝色常亮 正常启动 黄色灯闪烁 电量低于30% 红色灯闪烁 电量低于15% 产品型号说明
产品 SLAMWARE SDP Mini 型号 A1M1-R1 配置 SLAMWARE Core Lite 导航模块(型号:B1M4,型号说明可参考:SD002 SLAMWARE Core型号说明) RPLIDAR A2 激光测距雷达 Breakout 3.0 扩展板 两轮差动电机驱动 解除设备绑定及重置网络模式
如需将已绑定的SDP Mini绑定至另一账号或者SDP Mini所处的网络环境已发生变化时,请先从已绑定该SDP Mini的账号上将其删除来解除绑定,之后再reset Wifi即可绑定至其他账号或者在新的网络环境中使用。具体步骤如下:
a. 将SDP Mini中的SLAMWARE Breakout 3.0扩 展板上开关(SW1)拨至ON启动设备,SDP Mini正常开机
b.使用绑定该SDP Mini的用户账号登录至“机器人之家”手机应用程序,刷新“设备中心” ,此时被绑定的SDP Mini SSID将处于在线状态,点击右上角的编辑进入设备编辑模式,选择待删除的SDP Mini后的垃圾桶图标来删除设备,在弹出的提示框中选择是的,删除,该SDP即从该账号解绑。
c. 在网络环境发生变化时,请参照如下方法将处于Station模式的SDP Mini切换至AP模式以便于重新分配ip地址:
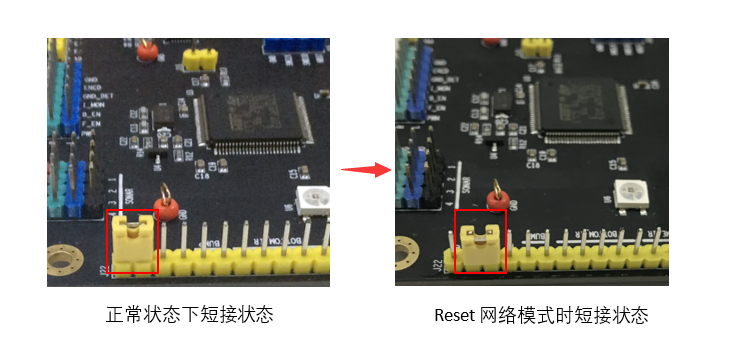
方式1:如下图所示,将SDP Mini的Breakout 3.0 的J22接口处GND和GND pin上的短接帽移除并重新接入至该接口的GND和RX2 pin脚,然后重启SDP Mini(SDP Mini 除正常启动时发声外,系统启动后蜂鸣器还会长鸣一声提示WiFi reset成功)即可将SDP Mini的Station模式reset至AP模式。
Note reset成功后,请关机并及时将短接帽还原至正常状态,以免影响后续使用。
- 方式2:用网线将SDP Mini连接至电脑端,然后从Chrome中登录至192.168.11.1(默认用户名:admin 默认密码: admin111)-》在页面右上方选择Administration菜单 -》在页面左侧菜单选择Configure WiFi -》在打开的页面最下方点选红色Restore按钮,restore成功后即可reset至AP模式。
相关文档
如果您是第一次使用SDP mini产品,请先参考KBSW185201 SLAMWARE SDP Mini 快速启动指南;
如需更多帮助,请联系 support@slamtec.com。