本页内容
简介
SLAMWARE模块化自主定位导航解决方案为SLAMTEC公司研发的可进行自主定位导航的核心控制模块。基于RPLIDAR,该模块可提供实时定位和自主导航功能,并支持串口和以太网总线交互导航信息。SLAMWARE模块化自主定位导航解决方案能直接完成地图建立、路径自主规划以及运动行走控制,无需额外计算,因而可以使用户更方便地在系统中集成此模块。
功能特性
- 超小型:仅30mm×51mm大小,外形基于标准MINI PCI-E机械外形。
- 自主:地图建立及定位导航一体化完成。
工作原理
SLAMWARE模块化自主定位导航解决方案的核心控制模块通过LBUS总线控制和读取RPLIDAR的实时平面图,并实时计算自己的位置坐标,之后通过CBUS(串口)和HBUS(以太网)输出导航信息。
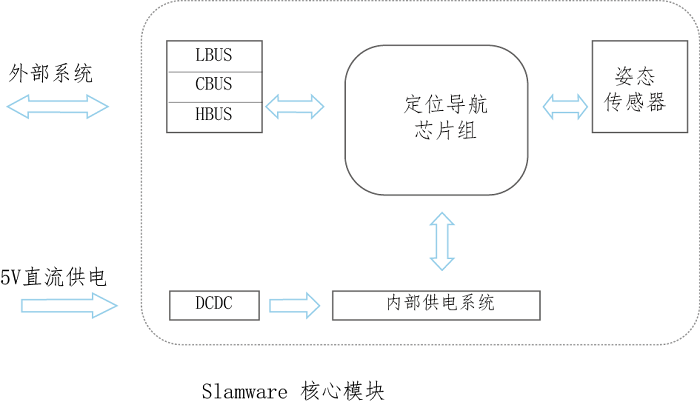
内部模块框图和使用方法
此模块仅需单一的5V直流供电即可工作。模块内部其余部件所需要供电均可由模块内部的电源网络产生。、
下图描述了SLAMWARE模块化自主定位导航解决方案的模块内部构造示意图。
特性
最大额定值
项目 | 范围 |
供电电压 | -0.5V ~+6.0V |
针脚电压 | -0.3V ~Vsc+0.3V |
工作温度以及保存温度 (TA) | -20oC ~+65oC |
电器特性
TA= 20oC
符号 | 参数 | 最小值. | 典型值. | 最大值. | 单位 |
VDD | 系统额定工作电压 | 4.75 | 5 | 5.25 | V |
IDD | 系统电流消耗 | - | TBD | TBD | mA |
VDD_IO | 数字接口电压范围 | 2.9 | 3.3 | 3.8 | V |
IDD_IO | 数字接口电流消耗 | - | - | TBD | mA |
VDIL | 数字输入低电平 | - | - | 0.2*VDD_IO | V |
VDIH | 数字输入高电平 | 0.8*VDD_IO | - | - | V |
VDOL | 数字输出低电平 | - | - | 0.2*VDD_IO | V |
VDOH | 数字输出高电平 | 0.8*VDD_IO | - | - | V |
ISTANDBY | 电流消耗@关机模式 | - | - | TBD | mA |
时间特性
TA= 20oC
符号 | 参数 | 最小值. | 典型值. | 最大值. | 单位 |
TSTARTUP | 通电启动时间 | - | - | TBD | s |
- | 地图解析分辨率 | - | 5 | - | cm |
fUART | UART串口波特率 | - | 115200 | - | bps |
fETH | 以太网工作频率 | - | 100 | - | Mhz |
| - | 建图面积 | - | - | 90000 | m2 |
注意
- 实际最大建图面积与具体的软件版本相关,详情请联系support@slamtec.com;
- 完成对应面积建图的时间消耗取决于具体的硬件设计,系统轮子移动的速度和需建图场地的复杂程度,与模块本身性能无关。
接口
SLAMWARE模块化自主定位导航解决方案的核心控制模块使用标准MINI PCIE的52针脚连接。
引脚定义
编号 | 名字 | 描述 |
1 | NC | 悬空引脚。请做悬空处理,不要接任何信号。 |
3 | GND | 系统供电地线。 |
5 | NC | 悬空引脚。请做悬空处理,不要接任何信号。 |
7 | NC | 悬空引脚。请做悬空处理,不要接任何信号。 |
9 | GND | 系统供电地线。 |
11 | NC | 悬空引脚。请做悬空处理,不要接任何信号。 |
13 | NC | 悬空引脚。请做悬空处理,不要接任何信号。 |
15 | GND | 系统供电地线。 |
17 | NC | 悬空引脚。请做悬空处理,不要接任何信号。 |
19 | NC | 悬空引脚。请做悬空处理,不要接任何信号。 |
21 | GND | 系统供电地线。 |
23 | ETH_RX- | HBUS以太网接收负极。 |
25 | ETH_RX+ | HBUS以太网接收正极。 |
27 | ETH_RREF | HBUS以太网接收端接电压。 |
29 | GND | 系统供电地线。 |
31 | ETH_TX- | HBUS以太网发送负极。 |
33 | ETH_TX+ | HBUS以太网发送正极。 |
35 | ETH_TREF | HBUS以太网发送端接电压。 |
37 | GND | 系统供电地线。 |
39 | NC | 悬空引脚。请做悬空处理,不要接任何信号。 |
41 | NC | 悬空引脚。请做悬空处理,不要接任何信号。 |
43 | GND | 系统供电地线。 |
45 | LPWM | LBUS RPLIDAR电机调速PWM。高脉宽占空比正比电机转速。 |
47 | LTX | LBUS RPLIDAR数据发送端口。需接至RPLIDAR RX。 |
49 | LRX | LBUS RPLIDAR数据接收端口。需接至RPLIDAR TX。 |
51 | nL5VEN | LBUS RPLIDAR核心供电控制引脚。 |
2 | 5V | 系统电源 +5V。 |
4 | GND | 系统供电地线。 |
6 | NC | 悬空引脚。请做悬空处理,不要接任何信号。 |
8 | CBUSY | CBUS 忙指示信号。OD门输出,高有效。 |
10 | CRX | CBUS 数据接收端口。 |
12 | CTX | CBUS 数据发送端口。 |
14 | GND | 系统供电地线。 |
16 | nCCMD | CBUS 数据中断指示信号。下降沿有效。需使用OD控制。 |
18 | GND | 系统供电地线。 |
20 | NC | 悬空引脚。请做悬空处理,不要接任何信号。 |
22 | NC | 悬空引脚。请做悬空处理,不要接任何信号。 |
24 | MLED | 系统正常工作指示信号。低有效。 |
26 | GND | 系统供电地线。 |
28 | 5V | 系统电源 +5V。 |
30 | NC | 悬空引脚。请做悬空处理,不要接任何信号。 |
32 | NC | 悬空引脚。请做悬空处理,不要接任何信号。 |
34 | GND | 系统供电地线。 |
36 | NC | 悬空引脚。请做悬空处理,不要接任何信号。 |
38 | NC | 悬空引脚。请做悬空处理,不要接任何信号。 |
40 | GND | 系统供电地线。 |
42 | NC | 悬空引脚。请做悬空处理,不要接任何信号。 |
44 | NC | 悬空引脚。请做悬空处理,不要接任何信号。 |
46 | NC | 悬空引脚。请做悬空处理,不要接任何信号。 |
48 | 5V | 系统电源 +5V。 |
50 | GND | 系统供电地线。 |
52 | 5V | 系统电源 +5V。 |
时序
SLAMWARE模块化自主定位导航解决方案的核心控制模块的所有通讯接口如LBUS、CBUS、HBUS等均使用遵循国际标准的UART,ETH规范。
典型电路
SLAMWARE模块化自主定位导航解决方案的核心模块的机械外形结构符合标准MINI PCI-E的机械尺寸。其厚度为上下各4mm,请在机械设计时保证空间余量,并做好散热通道。
该核心模块对应的MINI PCI-E卡座推荐使用MOLEX Edge Card Connector,PN:67910-9000,(0.80mm Pitch, 9.00mm Height, PCI Express* Mini Card, 52 Circuit, Right Angle, Surface Mount, 0.25µm Gold (Au) Plating, Tape on Reel, Lead-Free)。
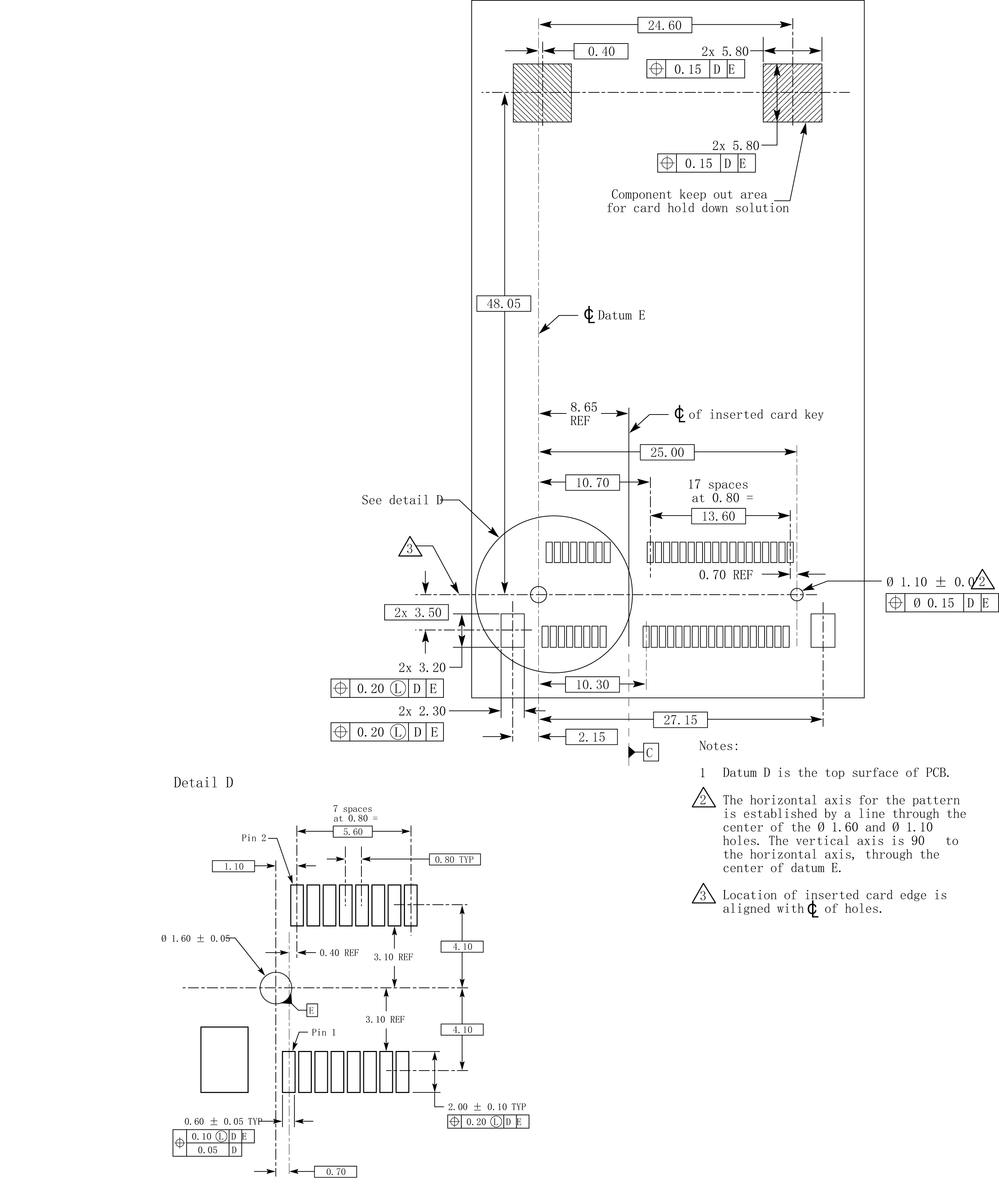
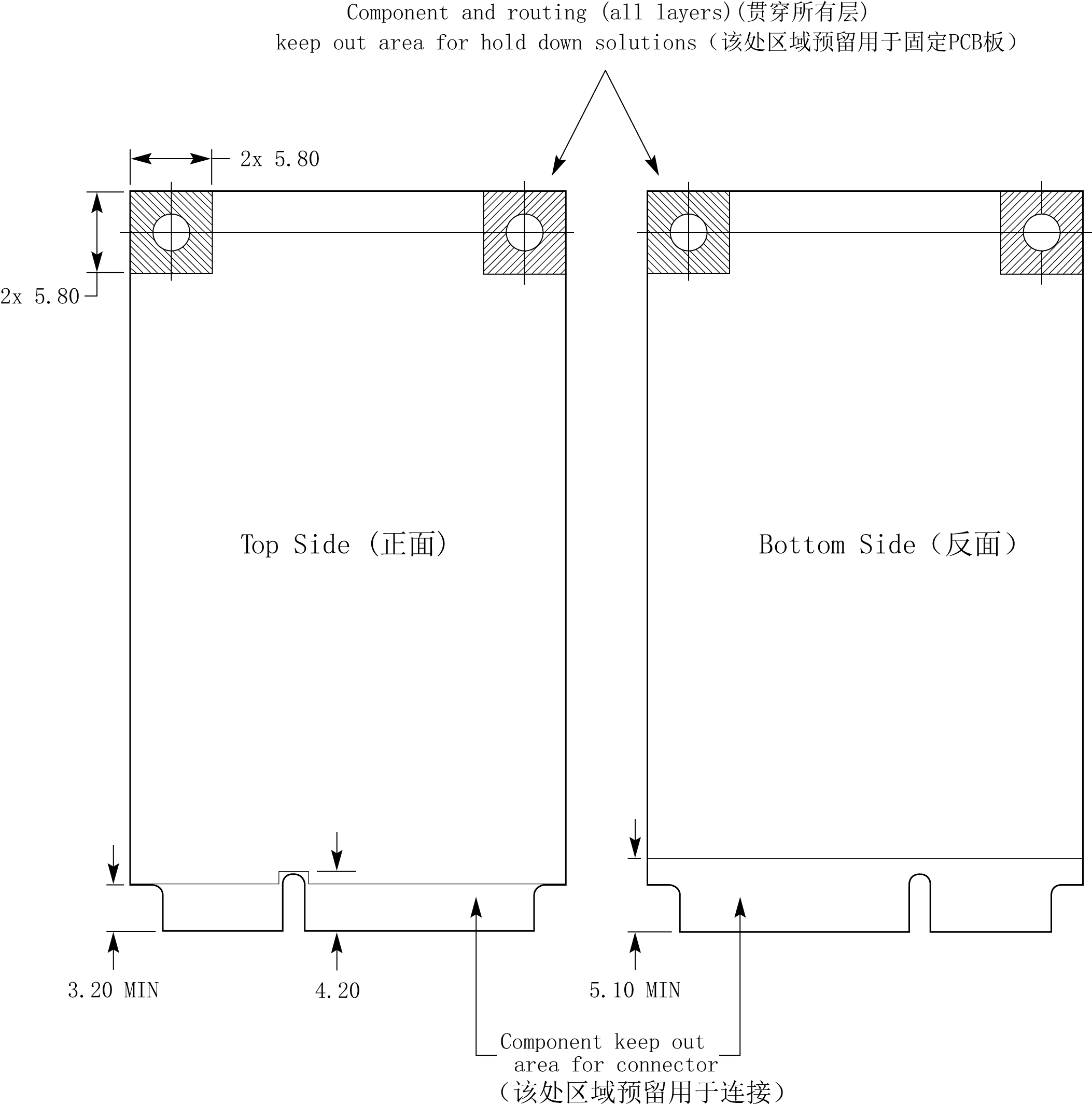
机械设计
SLAMWARE核心模块机械设计保留区域
SLAMWARE核心模块机械尺寸
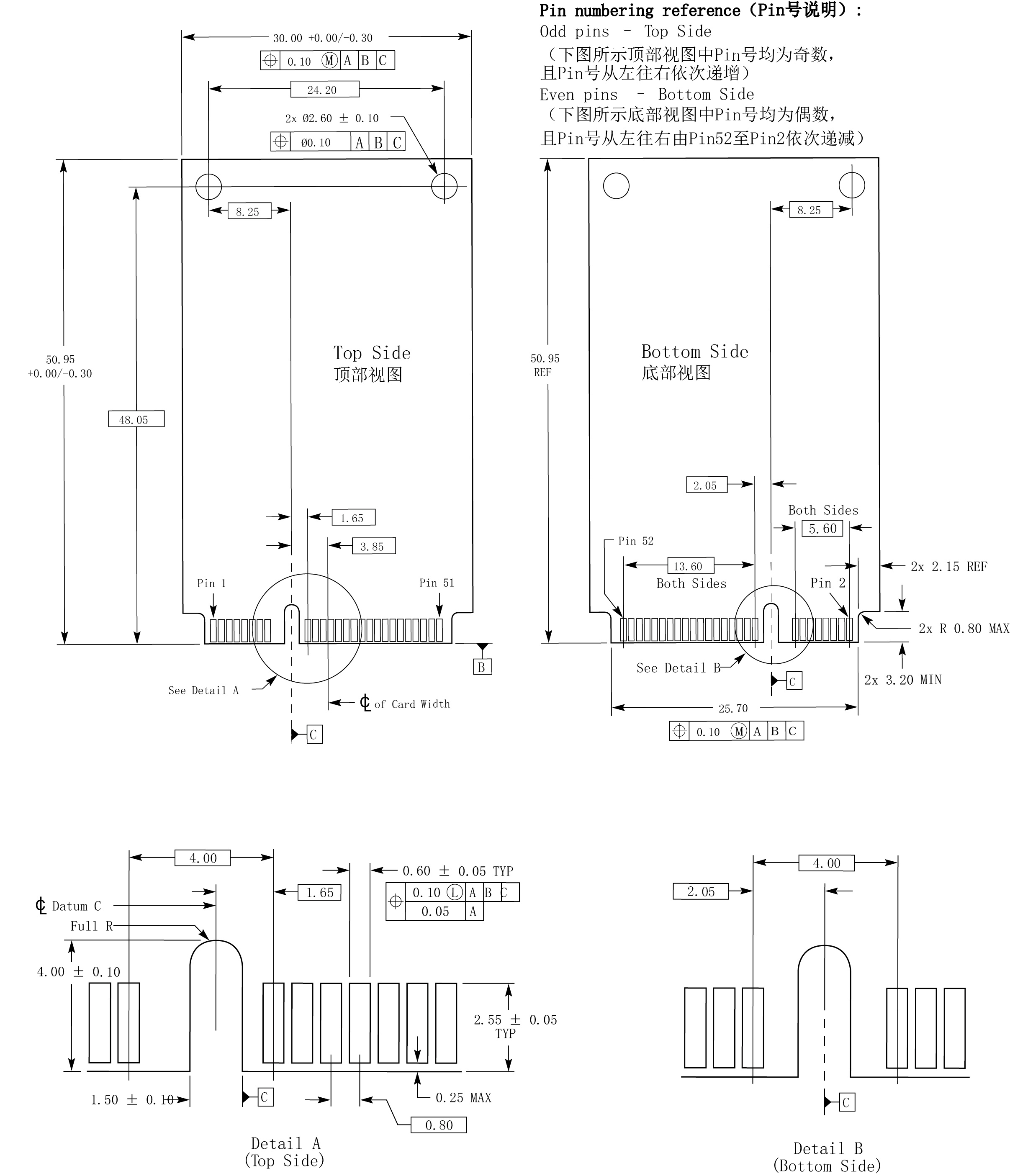
SLAMWARE核心模块布局设计