...
需要:
...
软件平台:
...
| language | cpp |
|---|---|
| title | Save Composite Map |
...
rpos::robot_platforms::objects::CompositeMap spCm = platform.getCompositeMap();
rpos::robot_platforms::objects::CompositeMapWriter tCmWriter;
std::string strErrMsg;
bool bRet = tCmWriter.saveFile(strErrMsg, filename, spCm);从本地上传CompositeMap到Slamware
| Code Block | ||||
|---|---|---|---|---|
| ||||
rpos::robot_platforms::objects::CompositeMapReader tCmReader;
std::string strErrMsg;
boost::shared_ptr<rpos::robot_platforms::objects::CompositeMap> spCm(tCmReader.loadFile(strErrMsg, filePath));
if (spCm){
platform.setCompositeMap((*spCm), pose);
} |
从CompositeMap里面读取GridMapLayer/LineMapLayer/PoseMapLayer的信息
...
| language | cpp |
|---|---|
| title | MapLayer |
...
- Visual Studio 2010
- Slamware Windows SDK: https://download.slamtec.com/api/download/slamware-sdk-windows/2.5.0%20dev%2020170718?lang=netural
- RoboStudio(显示虚拟轨道和虚拟墙): https://download.slamtec.com/api/download/robostudio-installer-win32/1.1.0_rtm?lang=netural
- Sample Code:
硬件平台:
(以下任选其一)
- Slamware SDP mini
- Slamware SDP
- Slamware 套装 (基于Slamware导航方案的用户机器人系统)
- Zeus/Apollo等底盘系统
编译运行:
...
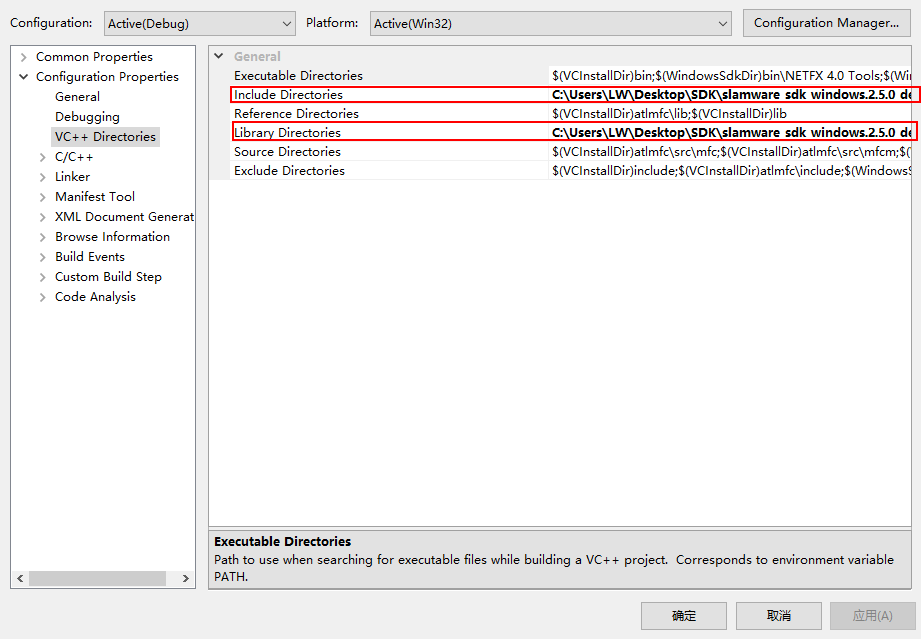
- 右键composite_map_demo, 打开属性选项,将Slamware SDK 的include目录和lib目录添加到工程
- 右键composite_map_demo, 将此工程设置成StartUp project
- 点击F5 运行
- 在debug目录下用命令行运行composite_map_demo, 用法如下: