应用层

如上图所示,激光点和墙不重合,主要原因可能是重新导入地图时,机器人的设置位置和实际位置不匹配所导致。
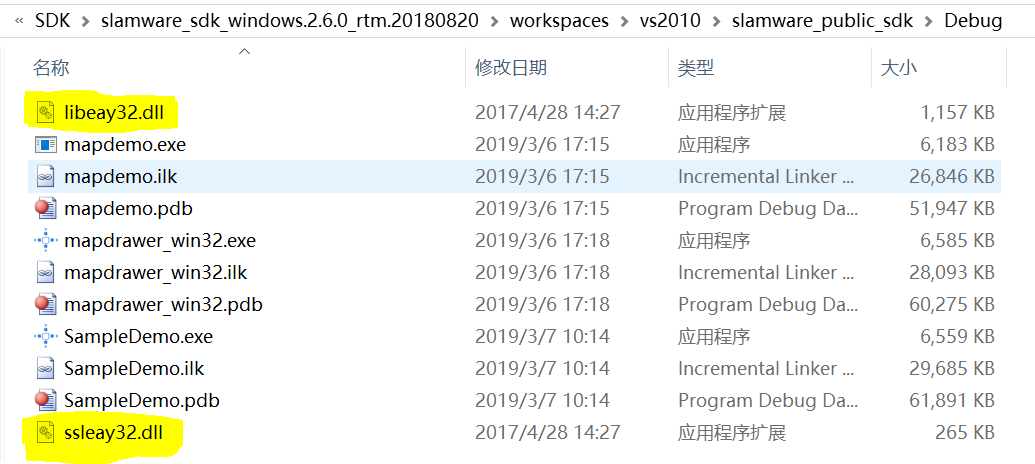
请使用VS2010编译,其他版本可能会出错。仔细阅读代码,编译调试前需要给您的机器如SDP Mini上电,连接上机器,并设置正确的命令行参数。如果调试时出现报错提示缺少dll如libeay32.dll,请将下面两个dll文件放到上图所示路径中。libeay32.dll ssleay32.dll
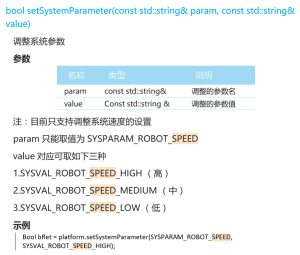
请参考上图,您可以直接给定义好的高、中、低三个值,也可以像下面这样实现自定义速度(最大线速度的范围应该在0.05到0.7之间):
bool bRet1 =sdp.setSystemParameter(SYSPARAM_ROBOT_SPEED, "0.3");
底盘部分
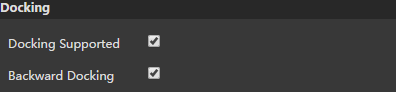
可以,在Slamware底盘配置工具里面Docking选项卡下面勾选Backward Docking。
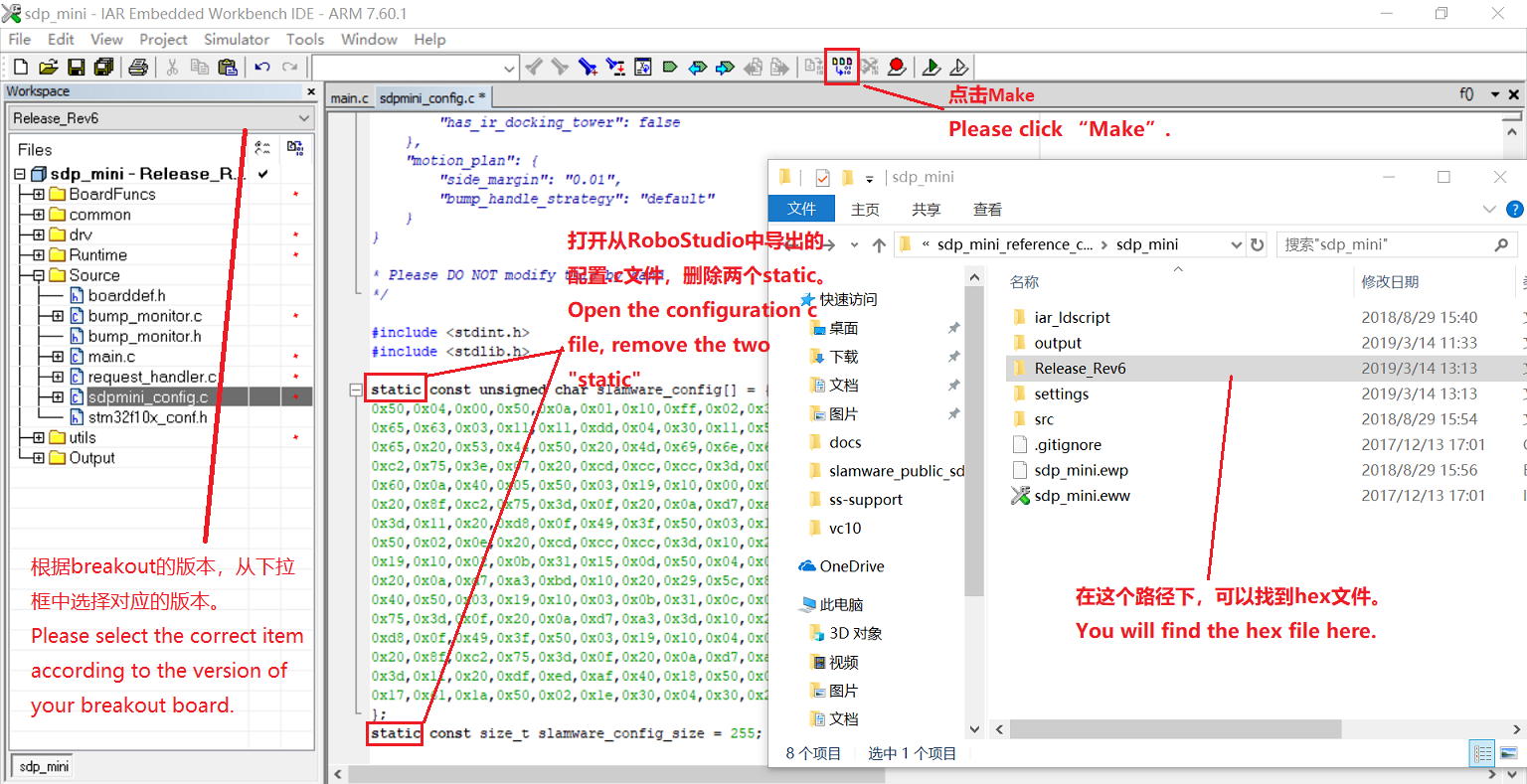
以使用的机器为SDP Mini为例,点击导出配置文件,将导出的.c文件命名为sdpmini_config.c,用来替代Project工程中原来的同名文件。将Project工程文件在IAR7.6及以上的版本中打开,左上角Workspace下的下拉框选择对应的版本,如使用breakout6.0就选择Release_Rev6,将导出的.c文件中的两处static删除后,点击Make,生成的hex文件用于烧录到breakout上的MCU中。
底盘的示例project中的controlbus用串口收发的buffer设置的是512,将其更改为1024可解决改问题。
