软件
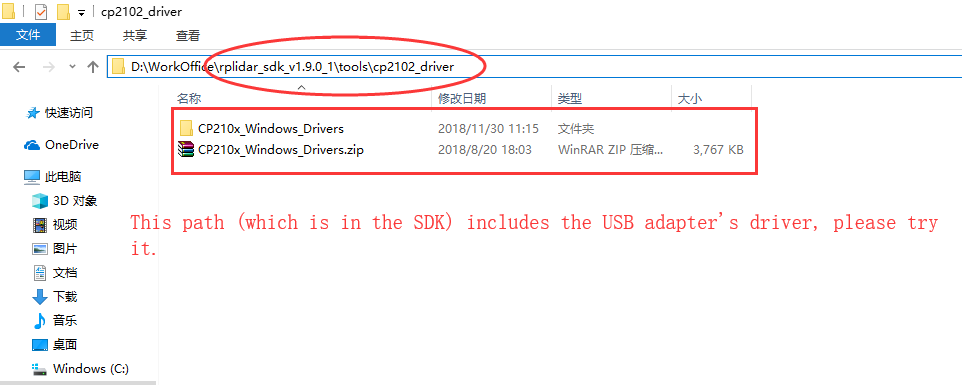
使用转接板连接之前,请先确保您已经正确安装了cp2102的驱动,驱动在雷达SDK下面的tools文件夹下可以找到。成功安装后,可在设备管理器>端口,查看电脑分配给它的串口号,如com3。打开RoboStudio>雷达>右击雷达面板空白处>手动连接雷达,选择对应的串口号即可。(通常A1&A2的波特率为115200,A2M7比较特殊,其波特率为256000,A3&S1为256000。)
Windows下目前只能用VS2010编译,其他版本的VS可能会出错。另外rplidar_driver是驱动文件,只可编译不可以运行的,另外3个project——frame_grabber simple_grabber ultra_simple ,是示例demo,是可以运行的 。注意在编译运行之前,确保您有给到程序需要的命令行参数(具体需要什么参数,请参阅实际代码)。
请先按照前面的步骤在Windows下用framegrabber或Robostudio测试雷达是否可以正常工作。其次,如果Ubuntu识别到雷达USB转接板,一般会显示为ttyusb0,打开串口时请切换至root权限或者给串口赋权限(比如:sudo chmod 666 /dev/ttyUSB0),以避免无法打开串口。

A3的室外模式是Stability。关于切换扫描模式,请详细阅读我们提供的SDK中的代码,Framegrabber中有实现该功能的完整代码。(上面几张图可供参考。)