This document introduces the demo project of "rotation_action_demo", including how to rotate clockwise, rotate anticlockwise and rotate to a particular angle.
Content
IDE Preperation
Software
- Visual Studio 2010 SP1
- Slamware Windows SDK:Slamware Windows SDK
- RoboStudio(for map display):Robostudio installer
Sample Code:
Higher version of Visual Studio will cause errors. sometime you will need to upgrade SP1 package to make your VS compatable with .Net Framework.
Hardware
(Either one of following)
- Slamware SDP mini
- Slamware SDP
- Slamware Kit
- Zeus/Apollo robot base
Download
Compiling
- Right click on "rotation_action_demo" project, set as StartUp project.

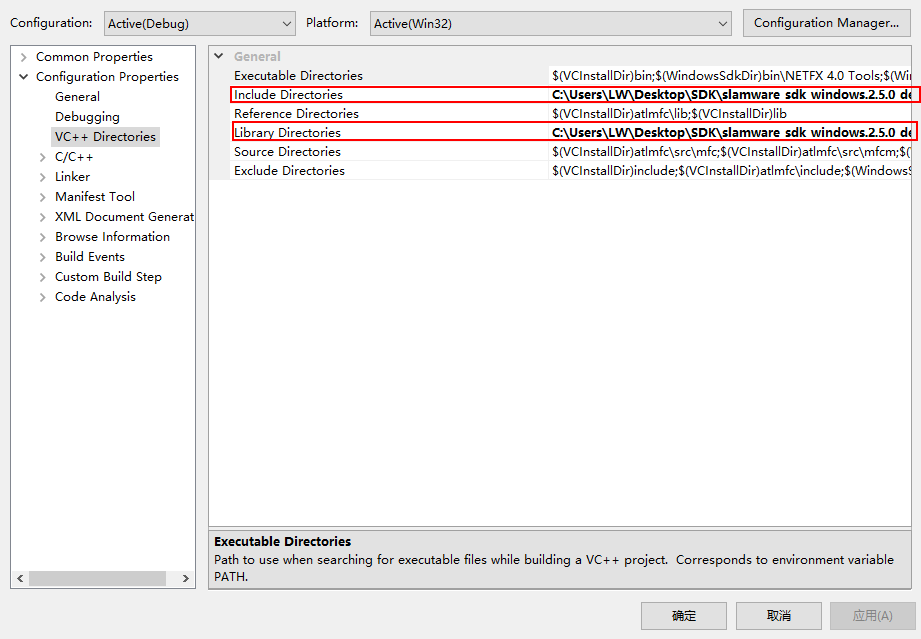
- Right click on "rotation_action_demo", then " Properties",configure "include" and "lib" directories to the corresponding folder path of Slamware SDK.
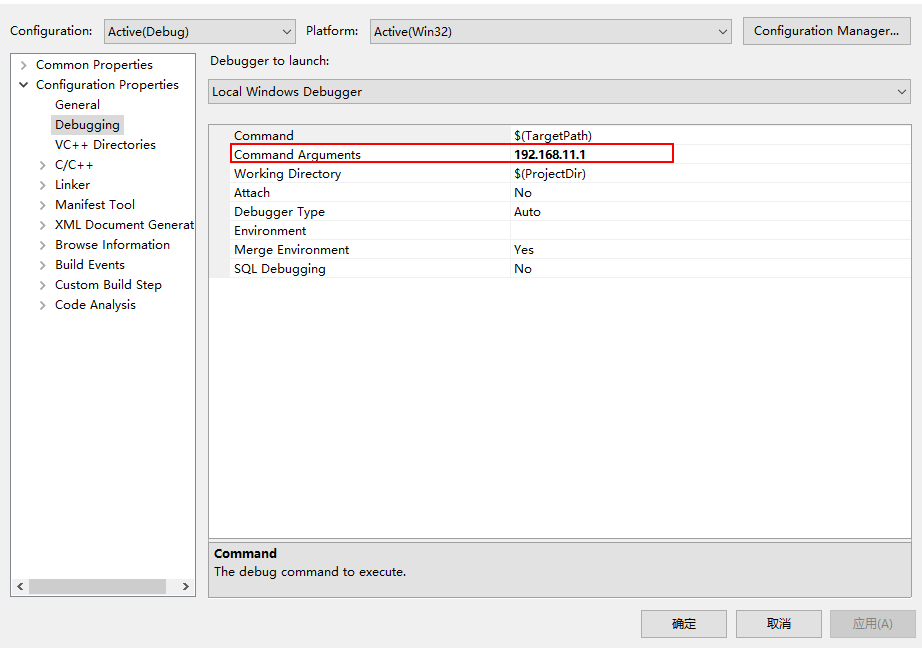
- Right click on "rotation_action_demo", then "properties",set "Command Arguments" as follows: Syntax :rotation_action_demo <IP address>
- Click " F5" to execute.
- Robot's motion could be seen in Robostudio.
Code
The robot will first turn anticlockwise, then clockwise, and finally turn to the position where the value of yaw is pi.
Rotate a particular angle/Rotate to a particular angleSlamwareCorePlatform sdp = SlamwareCorePlatform::connect(argv[1], 1445); std::cout <<"SDK Version: " << sdp.getSDKVersion() << std::endl; std::cout <<"SDP Version: " << sdp.getSDPVersion() << std::endl; rpos::actions::MoveAction action = sdp.getCurrentAction(); if (action) action.cancel(); //anticlockwise rotation rpos::core::Rotation rotation(pi*2, 0, 0); action = sdp.rotate(rotation); action.waitUntilDone(); std::cout << "Action Status: " << action.getStatus() << std::endl; //clockwise rotation rotation.yaw() = pi * (-2); action = sdp.rotate(rotation); action.waitUntilDone(); std::cout << "Action Status: " << action.getStatus() << std::endl; //rotate to a certain orientation rpos::core::Rotation orientation(pi, 0, 0); action = sdp.rotateTo(orientation); action.waitUntilDone(); std::cout << "Action Status: " << action.getStatus() << std::endl;