本页介绍了robot_health的用法, 包含机器人安全状态的输出和清除
本页内容
运行环境准备
软件平台
- Visual Studio 2010 SP1
- Slamware Windows SDK:Slamware Windows SDK
- RoboStudio(用于显示地图):Robostudio installer
Sample Code:
使用更高版本的Visual Studio可能会带来编译异常。
使用Visual Studio 2010(无SP1)可能会因为无法与.Net Framework兼容而报编译错误,此时增加SP1更新包即可解决问题
硬件平台
(以下任选其一)
- Slamware SDP mini
- Slamware 套装 (基于Slamware导航方案的用户机器人系统)
- Apollo/Ares/Athena等底盘系统
编译运行
- 打开samples工程,右键robot_health, 将此工程设置成StartUp project
右键robot_health, 打开属性选项,将Slamware SDK 的include目录和lib目录添加到工程
Slamware SDK的include和lib目录无需复制到参考例程目录,只需在Visual Studio里指定路径即可。

- 右键robot_health, 在Debugging页面中command Arguments处输入 192.168.11.1
格式说明: robot_health <IP address>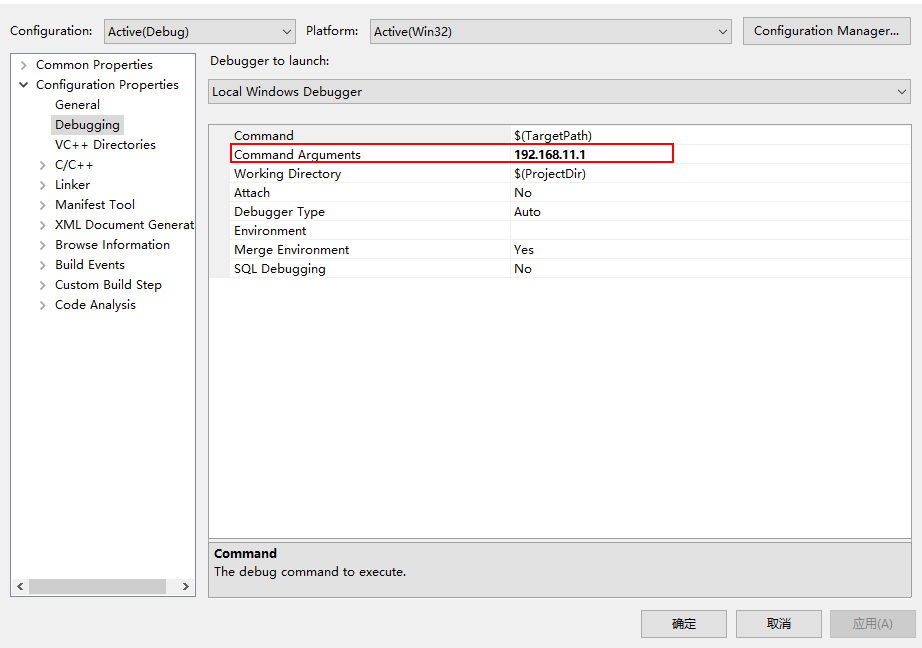
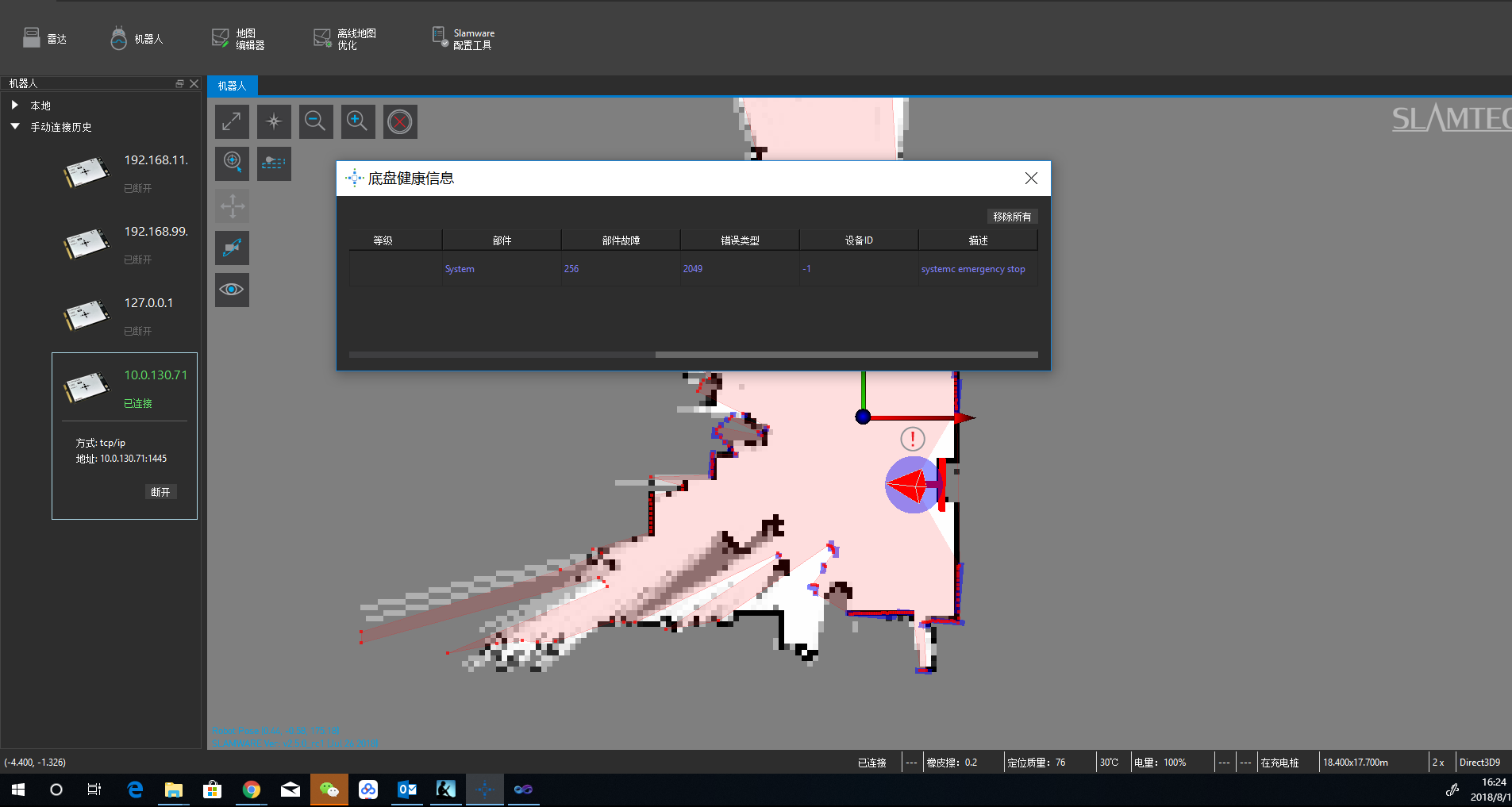
- 按下机器人急停按钮(以急停为例),点击F5运行
- 查看robostudio的显示
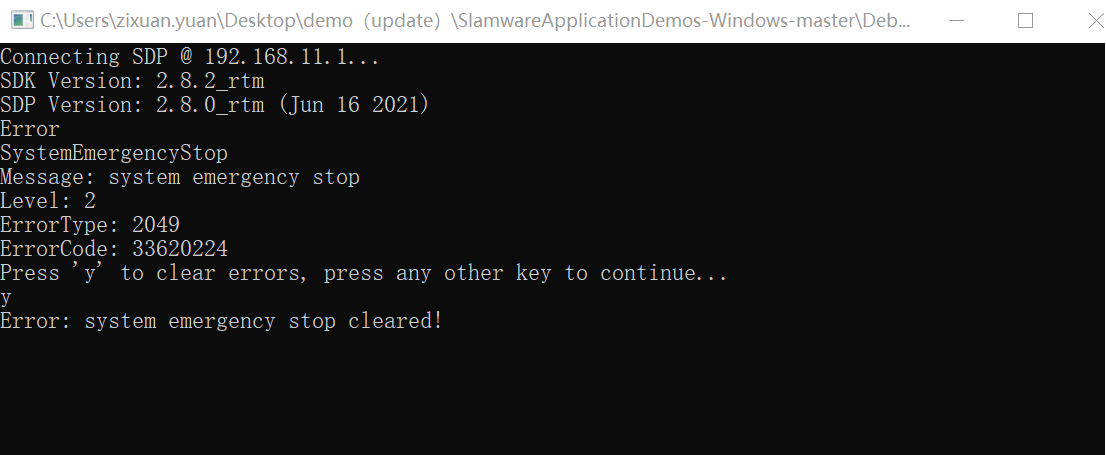
- console输出
代码描述
输出机器人的异常状态,并清除
导航到目标点SlamwareCorePlatform sdp = SlamwareCorePlatform::connect(ip_address, 1445); std::cout <<"SDK Version: " << sdp.getSDKVersion() << std::endl; std::cout <<"SDP Version: " << sdp.getSDPVersion() << std::endl; while(true){ BaseHealthInfo robot_health = sdp.getRobotHealth(); if(robot_health.hasError) std::cout << "Error" << std::endl; if(robot_health.hasFatal) std::cout << "Fatal" << std::endl; if(robot_health.hasWarning) std::cout << "Warning" << std::endl; if(*robot_health.hasLidarDisconnected) std::cout << "LidarDisconnected" << std::endl; if(*robot_health.hasSdpDisconnected) std::cout << "SdpDisconnected" << std::endl; if(*robot_health.hasSystemEmergencyStop) std::cout << "SystemEmergencyStop" << std::endl; for (auto it = robot_health.errors.begin();it != robot_health.errors.end(); ++ it) { std::cout << "Message: " << it->message << std::endl; std::cout << "Level: " << it->level << std::endl; std::cout << "ErrorType: "<< it->componentErrorType <<std::endl; std::cout << "ErrorCode: " << it->errorCode << std::endl; } int errors_size = robot_health.errors.size(); if(errors_size > 0){ std::cout << "Press 'y' to clear errors, press any other key to continue..." << std::endl; char is_error_clear; std::cin >> is_error_clear; if(is_error_clear == 'y' || is_error_clear == 'Y') { for (auto it = robot_health.errors.begin();it != robot_health.errors.end(); ++ it) { sdp.clearRobotHealth(it->errorCode); std::cout << "Error: " << it->message << " cleared!" << std::endl; } } } }