需要:
软件平台:
- Visual Studio 2010
- Slamware Windows SDK: https://download.slamtec.com/api/download/slamware-sdk-windows/2.5.0%20dev%2020170718?lang=netural
- Sample Code:
硬件平台:
(以下任选其一)
- Slamware SDP mini
- Slamware SDP
- Slamware 套装 (基于Slamware导航方案的用户机器人系统)
- Zeus/Apollo等底盘系统
编译运行:
准备工作: 开启机器人系统电源,雷达转动之后代表系统已经成功启动。
- 在sample code所在文件夹中,打开 samples.sln
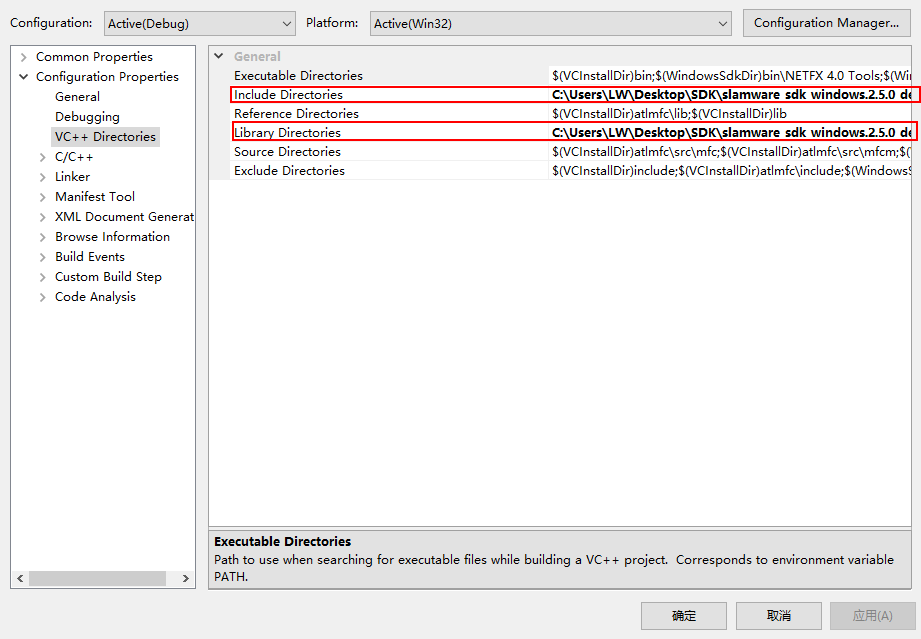
- 右键move_to_spot, 打开属性选项,将Slamware SDK 的include目录和lib目录添加到工程
- 右键move_to_spot, 将此工程设置成StartUp project
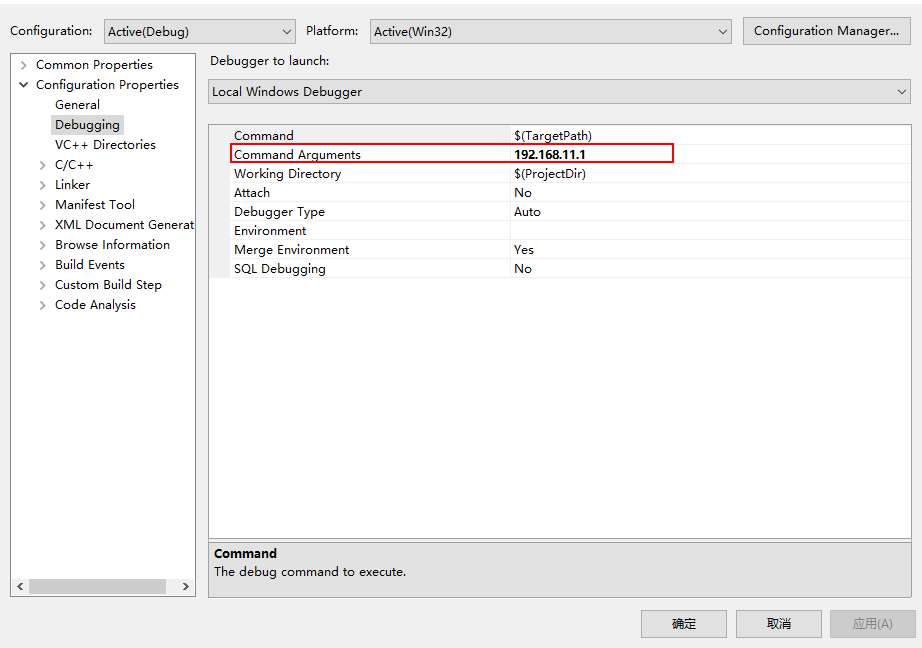
- 右键move_to_spot, 在Debugging页面中command Arguments处输入 192.168.11.1 (Slamware AP 模式默认IP地址)。 注: 此sample为 windows console application, 也可以在console中用命令行执行,用法为:move_to_spot <IP address>
- 点击F5运行
- (TODO 添加RoboStudio的视频)
描述:
代码功能说明: 机器人导航运动到(2, 0) 点,然后从(2,0) 沿虚拟轨道运动到(0, 0)点
导航到目标点SlamwareCorePlatform sdp = SlamwareCorePlatform::connect(argv[1], 1445); std::cout <<"SDK Version: " << sdp.getSDKVersion() << std::endl; std::cout <<"SDP Version: " << sdp.getSDPVersion() << std::endl; rpos::actions::MoveAction action = sdp.getCurrentAction(); if (action) action.cancel(); //move to location (2, 0), not on virtual track rpos::features::motion_planner::MoveOptions options; options.flag = MoveOptionFlag(MoveOptionFlagMilestone | MoveOptionFlagPrecise | MoveOptionFlagWithYaw | MoveOptionFlagReturnUnreachableDirectly); action = sdp.moveTo(rpos::core::Location(2, 0), options, pi); action.waitUntilDone(); if (action.getStatus() == rpos::core::ActionStatusError) std::cout << "Action Failed: " << action.getReason() << std::endl; //draw a virtual track from (0, 0) to (2, 0), then move to (0, 0) via virtual track rpos::core::Line line(rpos::core::Point(0,0),rpos::core::Point(2,0)); sdp.addLine(ArtifactUsageVirtualTrack, line); options.flag = MoveOptionFlag(MoveOptionFlagKeyPoints | MoveOptionFlagPrecise | MoveOptionFlagReturnUnreachableDirectly); action = sdp.moveTo(rpos::core::Location(0, 0), options); action.waitUntilDone(); if (action.getStatus() == rpos::core::ActionStatusError) std::cout << "Action Failed: " << action.getReason() << std::endl;