需要:
软件平台:
- Visual Studio 2010
- Slamware Windows SDK: https://download.slamtec.com/api/download/slamware-sdk-windows/2.5.0%20dev%2020170718?lang=netural
- RoboStudio(用于显示地图): https://download.slamtec.com/api/download/robostudio-installer-win32/1.1.0_rtm?lang=netural
- Sample Code:
硬件平台:
(以下任选其一)
- Slamware SDP mini
- Slamware SDP
- Slamware 套装 (基于Slamware导航方案的用户机器人系统)
- Zeus/Apollo等底盘系统
编译运行:
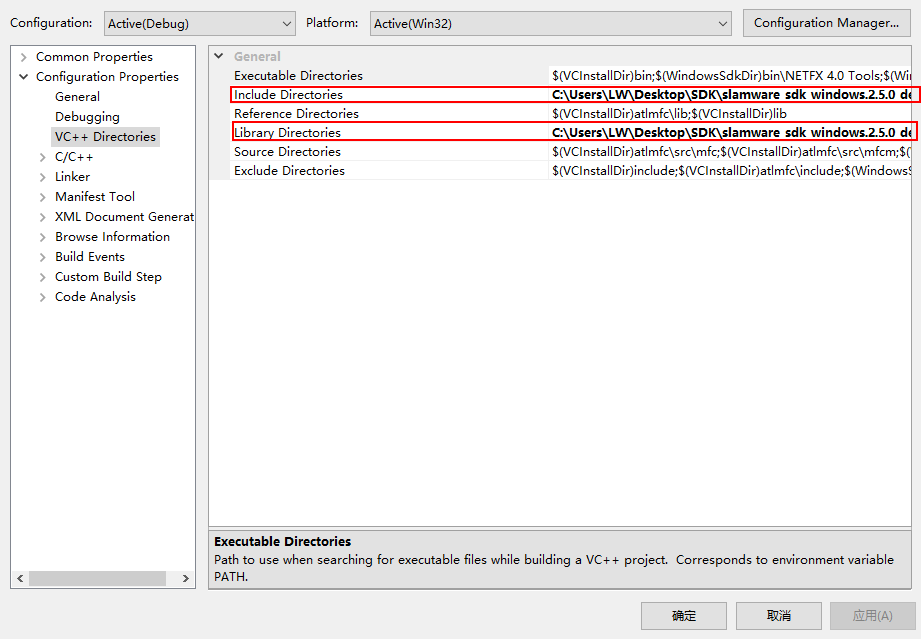
- 右键composite_map_demo, 打开属性选项,将Slamware SDK 的include目录和lib目录添加到工程
- 右键composite_map_demo, 将此工程设置成StartUp project
- 点击F5 运行
- 在debug目录下用命令行运行composite_map_demo, 用法如下:
composite_map_demo [OPTS] [filename] <SDP IP Address>
SDP IP Address The ip address string of the SLAMWARE SDP
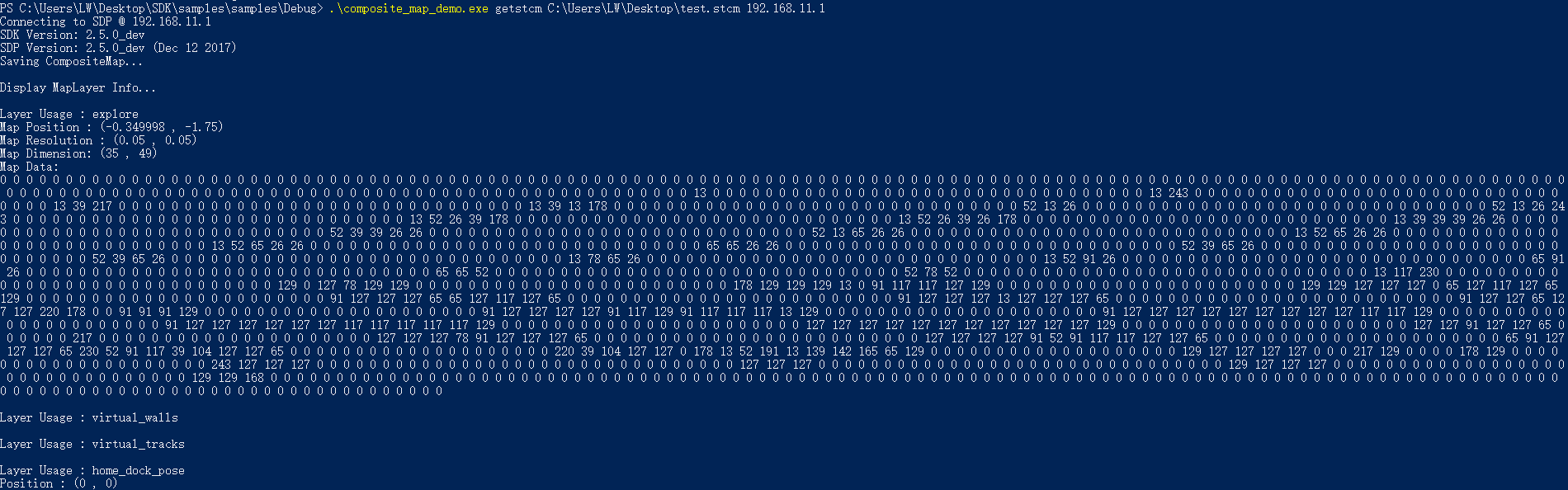
getstcm filename download compositeMap
If not specified, the default name map.stms will be used
setstcm filename upload compositeMap
-h Show this message 从slamware里面读取composite map(此操作会在桌面上生成一个test.stcm的地图文件,并在console中输出地图数据信息):
可以用Robostudio的地图编辑器来查看生成的地图:
- 将本地的composite map上传至slamware
可以先在Robostudio里面查看将要上传的地图:
将此底图上传至slamware: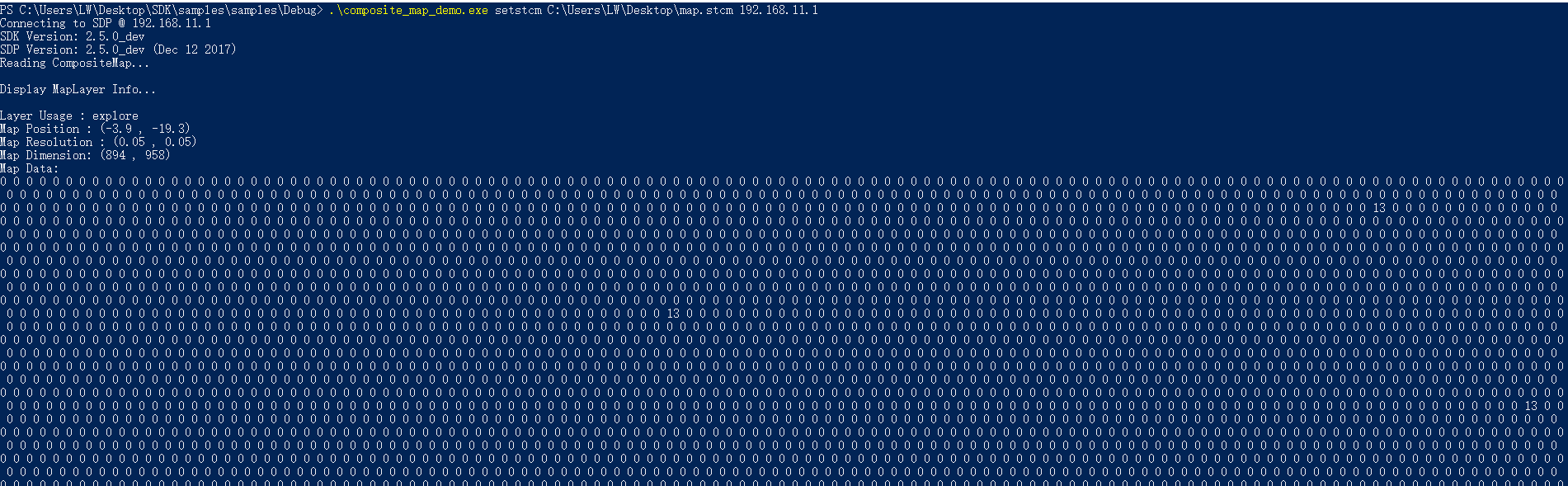
可以在Robostudio中连上机器人,可以看到地图已经上传成功
描述:
代码功能说明:从slamware模块下载composite map到客户端, 从客户端上传composite map至slamware模块,从composite map中读取虚拟轨道,虚拟墙等信息。
获取composite map
bool StcmMapWriter(const std::string file_name, SlamwareCorePlatform platform) {
CompositeMap composite_map = platform.getCompositeMap();
CompositeMapWriter composite_map_writer;
std::string error_message;
bool result = composite_map_writer.saveFile(error_message, file_name, composite_map);
return result;
}