...
| Table of Contents | ||||
|---|---|---|---|---|
|
...
概述
...
SLAMWARE模块通过control bus和机器人底盘连接,机器人底盘需要将底盘的正确配置信息上传至SLAMWARE模块,否则会导致定位导航行为异常。 与安装位置/
...
方向相关的配置信息主要包括:
(1)激光雷达的安装位置及方向;
(2)SLAMWARE模块的安装方向;
(3)碰撞传感器/红外测距传感器/
...
超声波传感器的位置;
上述配置会牵涉到底盘的参考坐标系,本文会详述此坐标系及不同组件的具体安装要求。除此之外,底盘配置工具slamware_config_tool还可以设置底盘大小,轮距,自动回充等其他参数,此工具具体用法将在下文中介绍。
机器人底盘参考坐标系
...
| title | 底盘坐标说明 |
|---|
X轴方向为机器人前进方向,Z轴方向为垂直向上。X轴Y轴的零点为底盘的水平正中心, Z轴的零点为地面。角度坐标以X轴正向为0度,逆时针方向为正。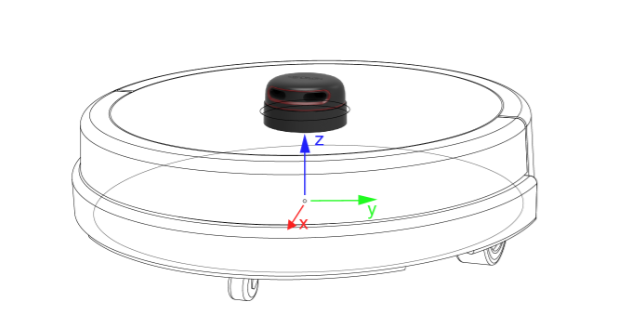
机器人基本设置
在左侧的Robot 界面中,可以进行机器人基本参数的配置,包含Robot, Slamware Core Pose 以及Dimension三部分,其中Robot部分内容与机器人行为无关,可以不做配置,保留默认即可。
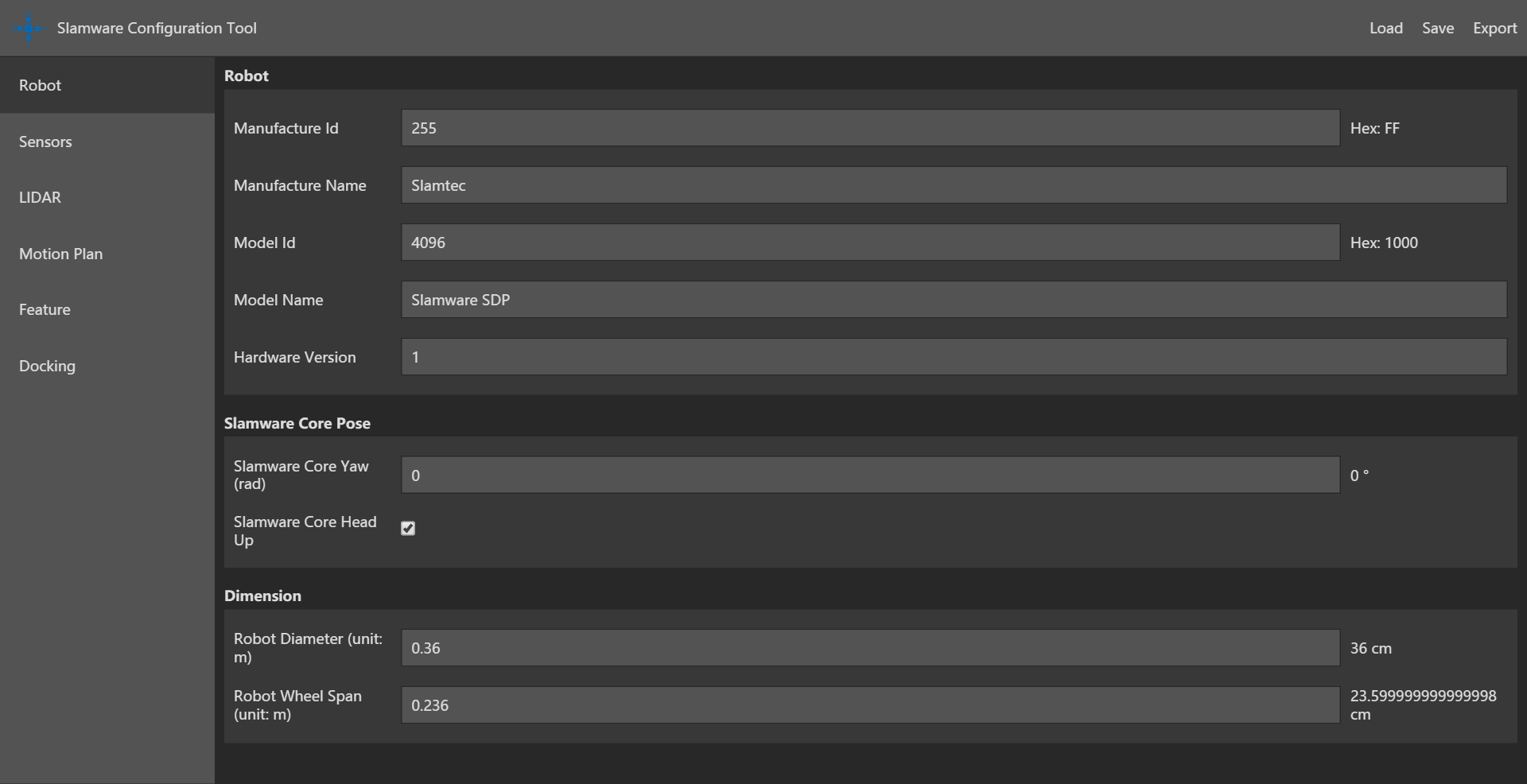
Slamware Core Pose设置
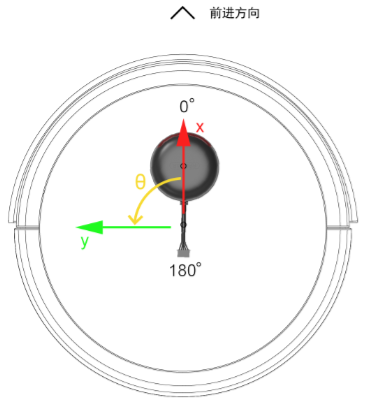
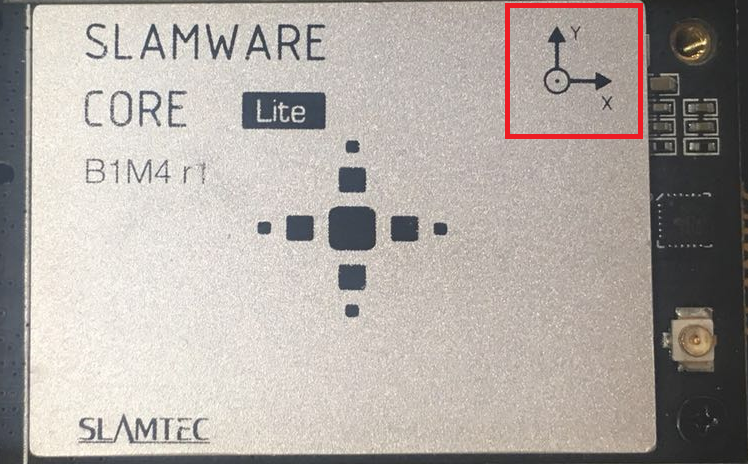
在Slamware configuration Tool左侧的Robot页面中,可以对Slamware模块的参数进行配置,其中Yaw角度为Slamware Core模块本身的安装角度,为下图模块X方向和底盘参考坐标X方向之间的逆时针夹角 。Slamware Core模块如果需要倒置安装(朝下),请不要勾选Slamware Core Head Up。注意,模块必须水平放置。
Dimension 设置
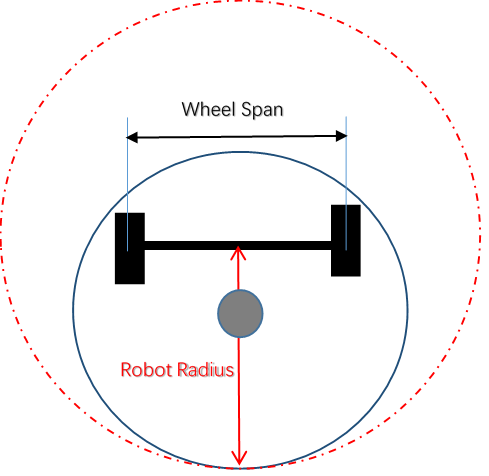
底盘的直径Robot Diameter, 需要设置成底盘外接圆的直径。 这个值是用来过滤激光雷达在底盘尺寸内扫描到的障碍点,防止底盘上的物体被当成障碍点造成导航不正常。 轮距Robot Wheel Span是机器人底盘轮子的外接圆直径(包括两轮和三轮全向轮),轮胎厚度的中心开始测量。
碰撞/超声/红外传感器设置
...
在slamware configuration tool左侧的Sensors页面中,可以对碰撞/超声/红外传感器的位置和角度进行配置,参考坐标为上述机器人底盘参考坐标。

激光雷达设置
| Info | ||
|---|---|---|
| ||
ID 不能重复定义,即使传感器的类型是不同的,ID也不可以定义重复。 |
激光雷达设置
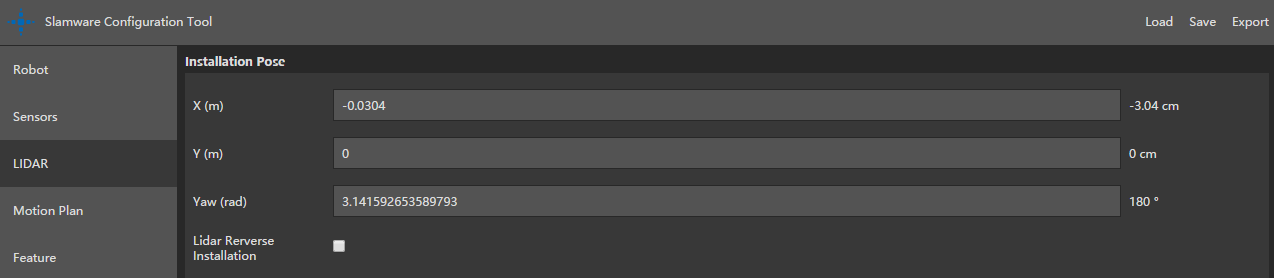
在Slamware configuration Tool左侧的LIDAR页面中,可以对激光雷达的参数进行配置,其中Yaw角度为激光雷达本身的安装角度,如上图中雷达的位置,X轴方向为雷达本身的零度方向(雷达连线方向的反向),
...
yaw值为雷达零度方向和机器人底盘X轴方向的逆时针角度。
激光雷达如果需要倒置安装(朝下),请勾选Lidar Rerverse Installation。
Slamware Core设置
| Info | ||
|---|---|---|
| ||
在Slamware configuration Tool左侧的Robot页面中,可以对Slamware模块的参数进行配置,其中Yaw角度为Slamware Core模块本身的安装角度,为上图模块X方向和底盘参考坐标X方向之间的逆时针夹角 。Slamware Core模块如果需要倒置安装(朝下),请不要勾选Slamware Core Head Up。注意,模块必须水平放置。 |

底盘尺寸和轮距
| Info | ||
|---|---|---|
| ||
底盘的直径Robot Diameter, 需要设置成底盘外接圆的直径。 这个值是用来过滤激光雷达在底盘尺寸内扫描到的障碍点,防止底盘上的物体被当成障碍点造成导航不正常。 轮距Robot Wheel Span是机器人底盘轮子的外接圆直径(包括两轮和三轮全向轮),轮胎厚度的中心开始测量。 |



配置文件保存
...
| title | Tip |
|---|
...
配置文件保存
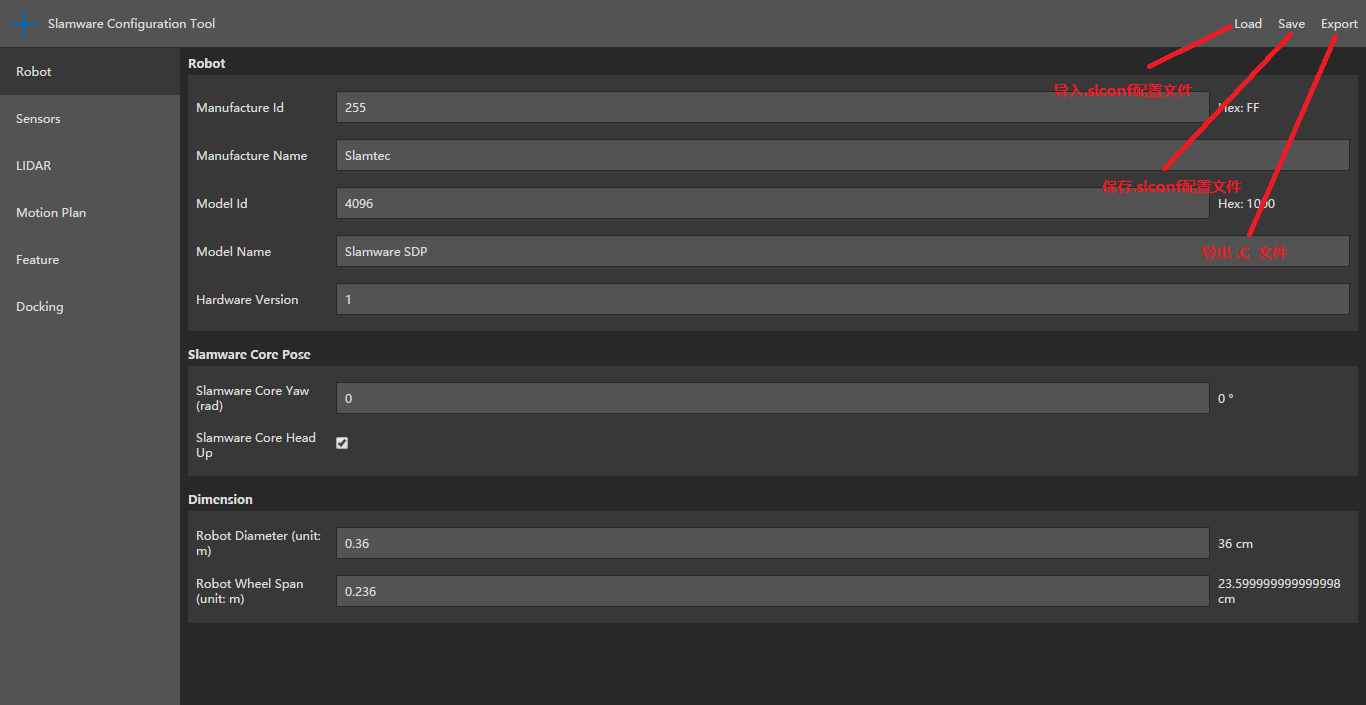
全部参数配置好之后,在应用程序的右上角,用户可以对配置进行load, save 以及Export 操作。
- Load:用户可以加载保存好的slconf文件。
- Save:用户可以保存配置到slconf文件。
- Export: 用户可以将配置导出为c文件,通过替换工程文件中对应配置文件的方式,可以将新配置更新到工程中。例如,如果使用的是SLAMTEC提供的关于SDPmini的参考代码,可以通过替换sdp_mini.c的方式更新配置文件。