...
The operating temperature range is -10°C to 50°C. The humidity range is 0 to 90%rh (no condensation)
2.What is the
...
lidar detection range?
The maximum scanning radius is 30m, 360° flat surface scanning.
...
11.What are the functions of the two switches next to the system switch?
Name | Image | Description | Remarks |
Emergency stop switch |
| It is used during emergency situations. When switch is pressed, the device will stop immediately. | |
Brake release switch |
| Pressing this switch after the device has been turned on will release the brake and allow you to push around freely; pressing it again will reapply the brake and prevent you from pushing the device freely. | When the device is not powered on, this brake switch is invalid. |


12.How to build a map?
Turn on the device, establish a connection with it using RoboStudio, then move the device using the controls. Once the entire map is constructed, you can modify it by adding POI points and other map components.
13.Can I connect to the robot using my phone and use it to create a map?
NoYes. You can download the APK from our website, the Android version of RoboStudio is still being upgraded and optimized and won't be made public until a later date. It is currently only available on Windows PCslink is https://www.slamtec.ai/downloads/.
14,Do I need to upload the map every time I turn on the robot?
...
It can be modified. Food Delivery App has a function for speed modification, which can be operated directly through the screen, and the modification range is 0.2m/s~0.7m1m/s~1,0m/s. (If you need to increase the speed, commercial customization is available.)
...
25.What is the meaning of charging stationindicator status?
Process | Prefabricated condition | Indicator light status | Description |
Power on and power off | charging station power on | Red light always on | Indicates that the charging station is properly powered up |
charging station power off | Red light off | Indicates that the charging station is disconnected from power | |
Automatic charging | The charging station is charging the main unit | Green light flash slowly (breathing flash) | Indicates that the device is charging at the charging station |
The device is fully charged | Green Light Always on | Indicates that the device is fully charged | |
Abnormal Status | charging station power-up self-test abnormal | Red light flashing quickly | Abnormal collision, check whether the charging shrapnel is normal |
charging station fuse anomaly | Red light flashing slowly | Self-restoring fuse popped, need to press to restore | |
charging station working abnormally | Alternating red and green light flash slowly | charging station abnormal or device abnormal (when there is no contact between device and charging station, it means charging station abnormal) |
26.Is there any requirement for the location of charging station?
...
Hermes has an 80 cm minimum narrow passage; if the customer needs a 60 cm narrow passage, we advise using the Athena2.0 chassis.
40.How to use the Restful API
Please kindly refer to the API development manual from the overseas help center(Topic 2.3) :https://wiki.slamtec.com/display/SD/Overseas+Help+Center
41.Robostudio cannot be connected
a).Please kindly connect to the base hotspot(Name as Slamware-xxxxxx,AP mode)or connect to local wifi(STA Mode), enter the robot IP address on the browser (The defualt IP address is 192.168.11.1.AP mode), and check whether the device SN information is fully displayed.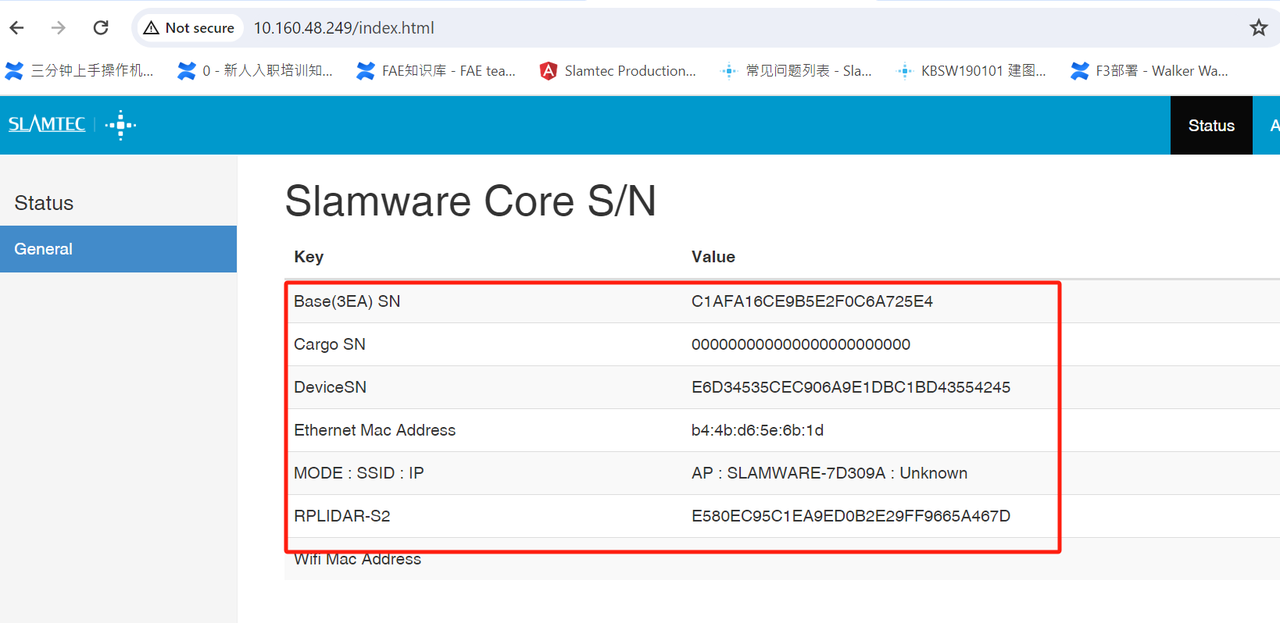
b). Check whether the USB3.0 usb hub or the typec cable of the base itself is connected correctly. If necessary, replug and test.
c).If the above cannot solve the issue, please kindly contact Slamtec for support.
42.Base Hotspot (Wifi) cannot be connected
Please use a network cable to connect the PC and the base network port, enter the base default IP address 192.168.11.1 on the browser ,and check whether the network is in AP mode or STA mode.
If it is STA mode,open the Network management and set Disable Android Network Management,or please connect an external screen / use an Android emulator to turn on the hotspot mode in the Android system(the hotspot is not enabled by default when power on under STA Android managment mode).
43.There is no output from the power interface
Please check whether the battery is installed properly and the interface is plugged in tightly. And contact Slamtec for remote support at the same time.
44.The base cannot automatically enable the hotspot when powered on
Please use a network cable to connect the PC and the base network port, enter the base default IP address 192.168.11.1 on the browser ,and check whether the network is in AP mode or STA mode.
If it is STA mode,open the Network management and set Disable Android Network Management.
If the above cannot solve the issue, please kindly contact Slamtec for remote support.
45.The robostudio show " "magtape [x] triggered" error message
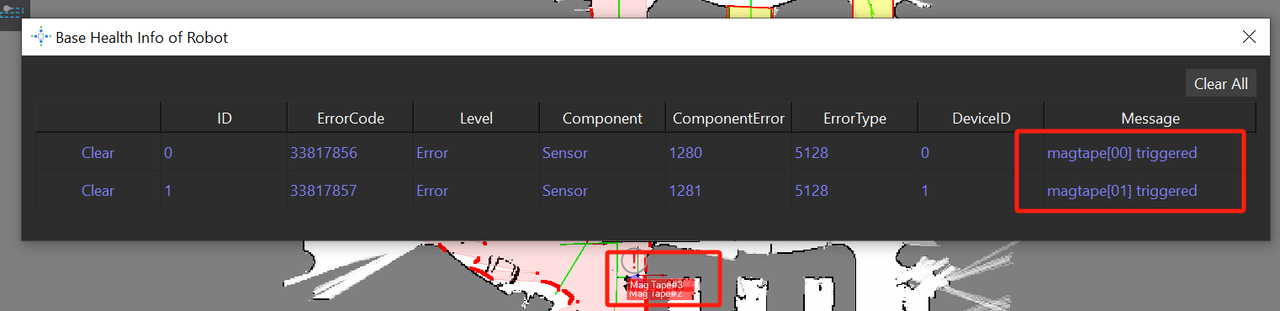
a)Please check whether the application scenario is flat and there is no magnetic environment on the ground.
b)Please click Clear All and check if the message disappears.
c)If step b cannnot solve the issue, please kindly turn off the magnetic sensor in Robostudio. The specific operation is as follows:
Enter the robot ip in the robot window and connect the robot
Right-click the robot ip address and select robot details
Select the sensors page, find the MagneticTapeDetector, right-click on status, and you can choose to disable always.

46.How to use the Precision Camera(QR Camera)
Please kindly refer to the QR camera documents from the overseas help center(Topic2.9)
https://wiki.slamtec.com/display/SD/Overseas+Help+Center
47.The base cannot be power on normally
a) Please check whether the power on button connection is loose
b)Check whether the battery is installed properly and the interface is plugged in tightly.
c)If the above steps cannot solve the issue, please contact Slamtec for remote support.
48.The base cannot be charged normally
a) Wipe the base and charging station shrapnel
b)Replace one normal charging station and check whether the base can be charged normally.
c)Check whether the base battery charging cable is connected properly.
d)If the above cannot solve the issue, please kindly contact Slamtec for remote support.
49.The base with external display or the robot's screen stuck at the logo display
Please kindly contact Slamtec for remote support.
50.How to set the base/robot speed on robostudio
After connecting the platform in robostudio, select motion strategy in the debug menu. After entering Motion strategy, you can use different strategies or enter the required speed in customized (speed range 0.1~ 1.5m/s).

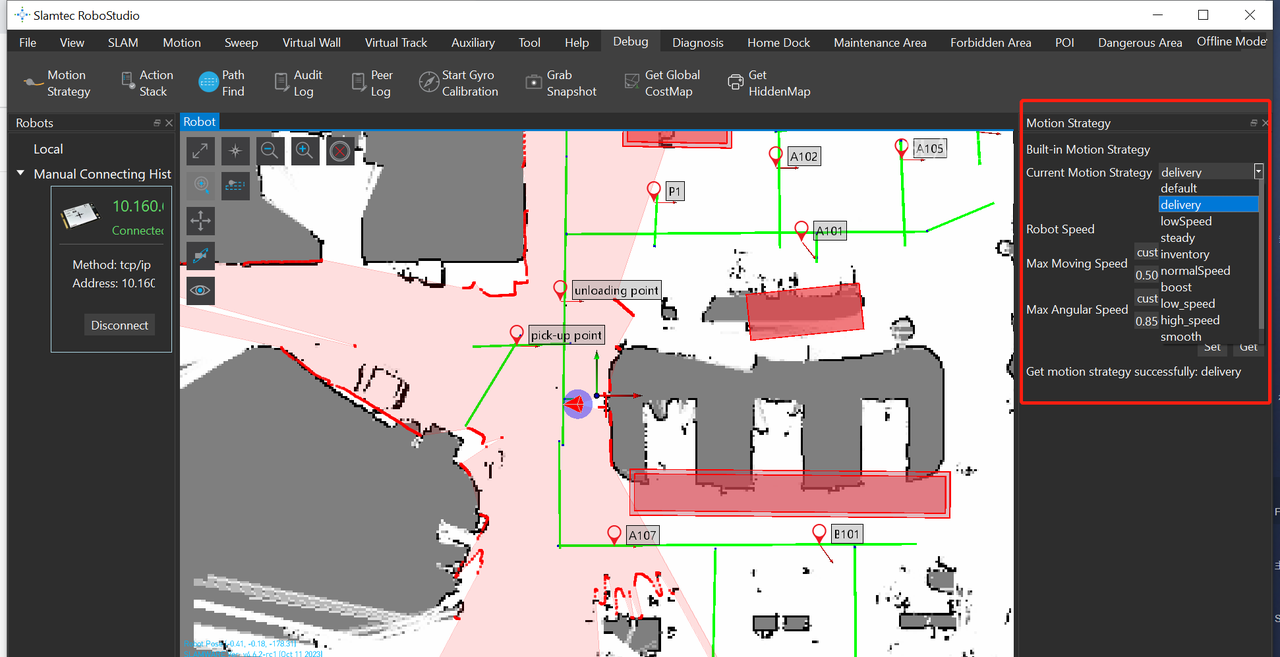
Note: Before changing the paltform speed, you need to click Pause Mapping in SLAM Menu
51.How to adjust the screen orientation when using the Slamtec Base/Robot
Please use the following ADB command:
adb shell content insert --uri content://settings/system --bind name:s:user_rotation --bind value:i:1
try to change bind value from 0 to 3
52.One wheel cannot move issue(Old version Base Apollo, Athena1.0)
a) Please check the driver's LED light status
b) Re-insert and unplug the drive cable, and exchange the drive cable if necessary to see if the problem has been transferred
c) Please kindly contact Slamtec for remote support.