在机器人开发过程中可能会出现非正常行为,在沟通的过程中需要反馈一些数据Log,以便思岚进行数据分析。本文将通过GetLogInfo介绍如何使用Android SDK来获取底盘的Log信息,以便分析之用。机器人在某些特殊场景下,运行过程中可能会出现非正常行为,在沟通的过程中需要反馈一些数据Log,以便思岚进行数据分析。本文将通过FecthSlamwareLog介绍如何调用Android SDK来一键获取底盘的Log信息,以便分析之用。
...
本页内容
| Table of Contents |
|---|
...
运行环境准备
软件平台
- Android Studio 3.1.3
- Slamware Android SDK: slamware_sdk_android.2.6.0_dev.20180917.tar.gz
- RoboStudio(用于显示地图):Robostudio installer
RoboStudio 插件:peer log / action stack / diagnosis,其中插件的激活码需要申请,由思岚工程师提供
- Sample Code: SampleCode.java
Info title 注意 Slamware 的固件和SDK在2018年9月14日才添加用户获取Log的功能和接口,如有获取Log的需求,请更新至2018年9月14日的版本。
使用不同版本的Android Studio可能会带来编译异常,请自行下载相关库和修改build.gradle配置文件,本例程基于Slamware Android SDK 2.6.0 进行开发,若想尝试更高的SDK版本,请直接替换工程中的 slamware_sdk_android.jar 和 librpsdk.so 文件。
硬件平台
...
- Slamware SDP mini
- Slamware SDP
- Slamware 套装 (基于Slamware导航方案的用户机器人系统)
- Zeus/Apollo等底盘系统
...
编译运行
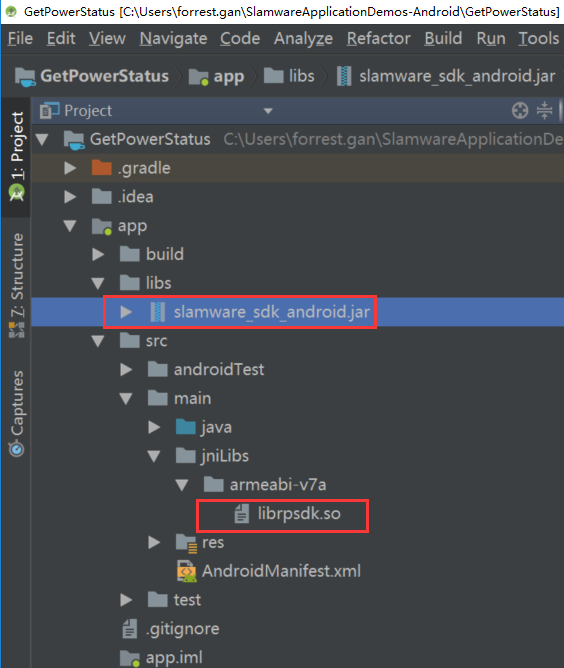
- 打开GetLogInfoFecthSlamwareLog工程,检查libs路径下是否有 slamware_sdk_android.jar 文件,以及jinLibs路径下是否有 librpsdk.so 文件,若想尝试其他版本的SDK,请直接将这两个文件替换。
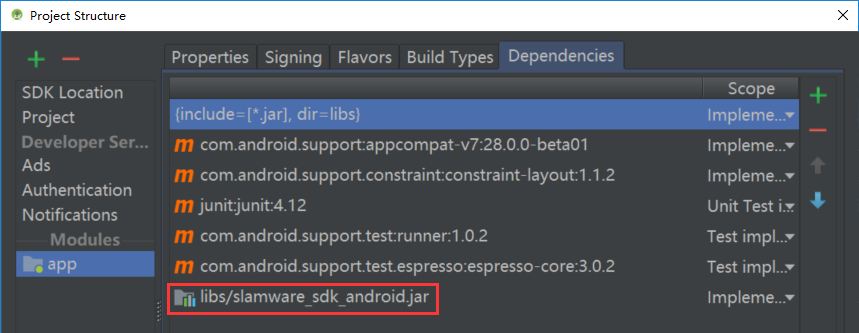
到 Project Structure --> app --> Dependencies 检查Slamware SDK是否添加到工程中。
将以下代码段的"10.0.130.71"修改为底盘的IP地址,默认情况下为192192.168.11.1,当WIFI处于Station模式下请将PC与底盘使用Ethenet连接后查看。方法说明:AbstractSlamwarePlatform 1"修改为底盘的IP地址,当WIFI处于Station模式下请将PC与底盘使用Ethenet连接后查看。方法说明:AbstractSlamwarePlatform connect(String host, int port),其中host为底盘IP,port为网络端口号,返回值为底盘的实例对象。
Code Block language java theme Midnight // connect to the robot. String ip = "10192.0168.13011.711"; int port = 1445; Log.i("MyCorePlatform", "start to connect."); com.slamtec.slamware.AbstractSlamwarePlatform corePltfm = com.slamtec.slamware.discovery.DeviceManager.connect(ip, port);
Android设备连接底盘发射出的WIFI或连入底盘的同一网络,按下shift + F10 运行,可以在AS Logcat中看到通过SDK获取到的Log信息,如下图所示。运行,获取Log信息的过程如下。
Multimedia name GetSlamwareLog.mp4 


Info 本例程仅仅用作最简单SDK类和方法的演示,故没有设计Android界面
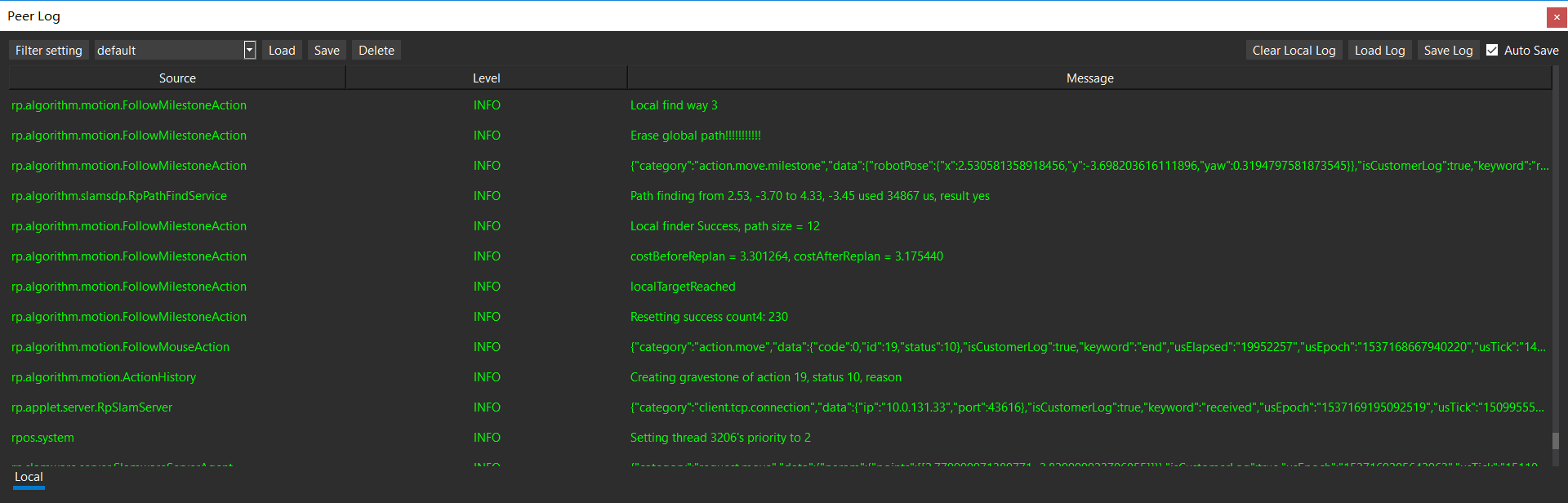
- Robostudio peer log插件显示的Log如下图所示,使用Robostudio 获取查看底盘Log信息的方法请参考 KBSW180156 如何使用robostudio采集分析问题所用数据。
- Log数据的相关格式请参考Log Samples Of Customer Log.pdf,Android SDK的Log相关的接口说明请参考Slamware-log-customer文档.pdf。
代码描述
...
Warning title
...
try {
// connect to the robot.
String ip = "10.0.130.71";
int port = 1445;
Log.i("MyCorePlatform", "start to connect.");
com.slamtec.slamware.AbstractSlamwarePlatform corePltfm = com.slamtec.slamware.discovery.DeviceManager.connect(ip, port);
if (null == corePltfm)
{
Log.e("MyCorePlatform", "Failed to connect.");
return;
}
Log.i("MyCorePlatform", "Connected");
// Create Customer Log Receiver for receiving logs;
// If the connection is lost, the old log receiver will not work, a new one should be created.
com.slamtec.slamware.log.customer.ICustomerLogReceiver logReceiver = corePltfm.createCustomerLogReceiver();
if (null == logReceiver)
{
Log.e("MyLogReceiver", "Failed to create.");
return;
}
Log.i("MyLogReceiver", "Created");
com.slamtec.slamware.log.customer.CustomerLogReceiverInitArg initArg = null;
// if you want to resume the last receive status, load the saved status data like the following codes:
/*
{
initArg = new com.slamtec.slamware.log.customer.CustomerLogReceiverInitArg();
initArg.setLastRecvStatus(lastRecvStatus); // lastRecvStatus is the last receive status data you saved before
}
*/
com.slamtec.slamware.log.customer.ResultCode resCode = logReceiver.init(initArg);
if (com.slamtec.slamware.log.customer.ResultCode.Ok != resCode)
{
Log.e("MyLogReceiver", "Failed to init, resCode: " + resCode.name());
return;
}
boolean isWorking = true;
while (isWorking)
{
// some other operations of your application
int maxCntToRead = 0; // set to zero to use the default value of the robot.
com.slamtec.slamware.utils.StdPair<com.slamtec.slamware.log.customer.ResultCode, com.slamtec.slamware.log.customer.ReadResult> pairRes
= logReceiver.recvLogs(maxCntToRead);
if (com.slamtec.slamware.log.customer.ResultCode.Ok == pairRes.getFirst())
{
showMyLogsResult_(pairRes.getSecond());
}
else
{
Log.e("MyLogs", ("ResultCode: " + pairRes.getFirst().name()));
}
// some other operations of your application
Thread.sleep(100);
}
// you may save it for the next time to continue to receive logs if you want.
/*
{
com.slamtec.slamware.log.customer.CustomerLogReceiverLastRecvStatus lastRecvStatus = logReceiver.getLastRecvStatus();
// now you can save lastRecvStatus somewhere for the next time
}
*/
}
catch (Exception e) {
Log.e("MyException", e.toString());
}...
| language | java |
|---|---|
| theme | Midnight |
...
注意 由于log文件是靠网络传输,获取log时请确保上位机与slamware网络连接正常,根据log文件大小的不同,整个获取过程中的耗时也会存在差异。另,获取log会影响slamware自身的运算性能,获取log时请确保底盘静止,未处于需要大量运算的复杂场景,一键获取log过程中出现的一系列问题不在本司的负责范围之内。
...