This document introduces the demo project of "rotation_action_demo", including how to rotate clockwise, rotate anticlockwise and rotate turn to a particular angle.
...
Content
...
- Right click on "rotation_action_demo" project, set as StartUp as StartUp project.

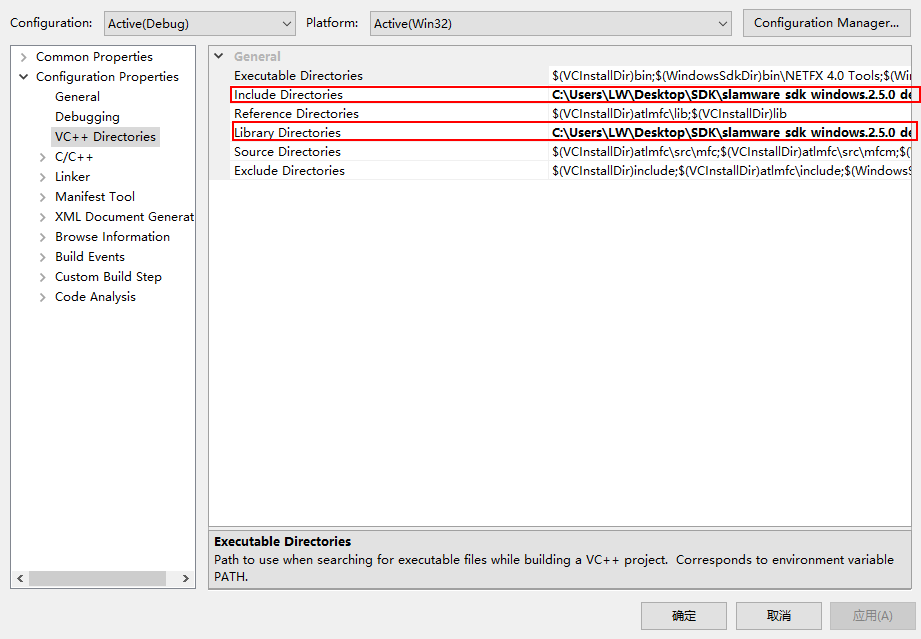
Right click on "rotation_action_demo", then " Properties",configure "include" and "lib" directories to the corresponding folder path of Slamware
SDK.SDK.
Info It's not necessary to copy files to the project directory, user will only need to configure the path of SDK.
- Right click on "rotation_action_demo", then "properties",set "Command Arguments" as follows:
Syntax :rotation:rotation_action_demo <IP address>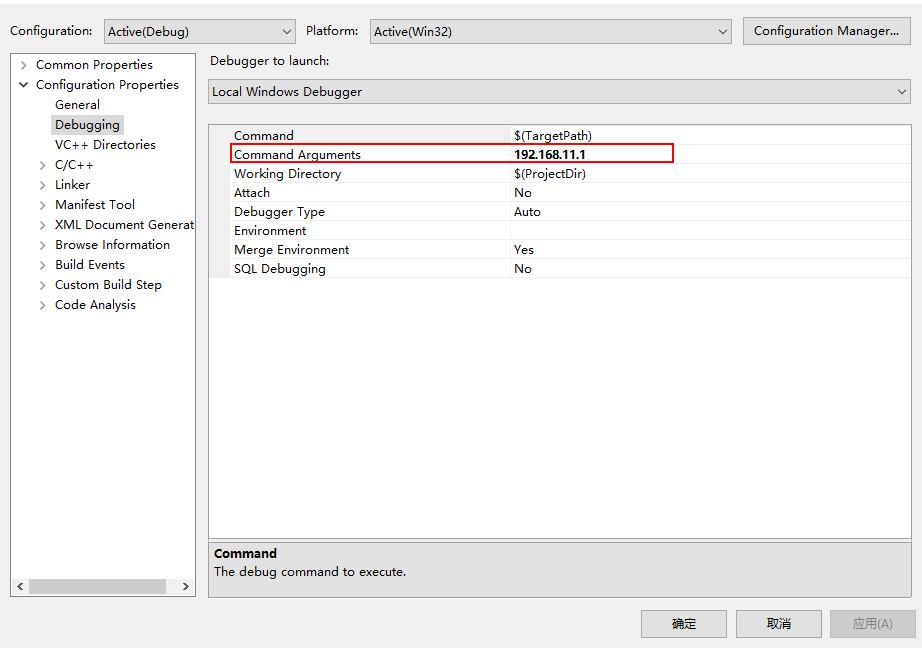
- Click " F5" to to execute.
- Robot's motion could be seen in Robostudio.
Rotate to a specified angleMultimedia date // 旋转到指定角度 name bandicam 2018-01-30 16-13-28-334.mp4
...
Code
The robot will first turn anticlockwise, then clockwise, and finally turn to the position where the value of yaw is pi.
Code Block language cpp firstline 1 title Rotate a particular angle/Rotate to a particular angle linenumbers true SlamwareCorePlatform sdp = SlamwareCorePlatform::connect(argv[1], 1445); std::cout <<"SDK Version: " << sdp.getSDKVersion() << std::endl; std::cout <<"SDP Version: " << sdp.getSDPVersion() << std::endl; rpos::actions::MoveAction action = sdp.getCurrentAction(); if (action) action.cancel(); //anticlockwise rotation rpos::core::Rotation rotation(pi*2, 0, 0); action = sdp.rotate(rotation); action.waitUntilDone(); std::cout << "Action Status: " << action.getStatus() << std::endl; //clockwise rotation rotation.yaw() = pi * (-2); action = sdp.rotate(rotation); action.waitUntilDone(); std::cout << "Action Status: " << action.getStatus() << std::endl; //rotate to a certain orientation rpos::core::Rotation orientation(pi, 0, 0); action = sdp.rotateTo(orientation); action.waitUntilDone(); std::cout << "Action Status: " << action.getStatus() << std::endl;
...