| Excerpt |
|---|
在构建完毕地图以后,由于slamcore没有保存地图的功能,需要从上位机加载地图到slamcore里面,以便地图的复用。构建地图的过程请参考:KBSW180151 如何构建一张满足导航需求的地图? 本文档解释了关于加载地图的操作步骤,以及整个流程中需要注意的事项,比如,重定位是加载地图必不可少的一步,经常会被用户忽略。建议操作过程中,按照本文档的步骤来进行。 |
本页内容
| Table of Contents |
|---|
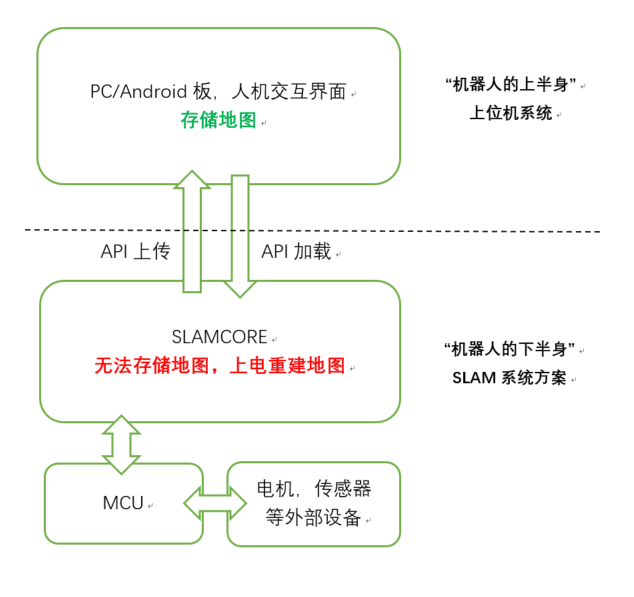
系统架构图解
slamcore不具备保存地图的功能,地图需要从上位机上加载,请用户在使用的时候注意这点。
使用Robostudio 加载地图
在使用robostudio加载地图之前需要准备的有:
| Excerpt |
|---|
|
- 开机状态
- 加载地图
为了覆盖机器人里面当前的地图,我们需要进行以下操作。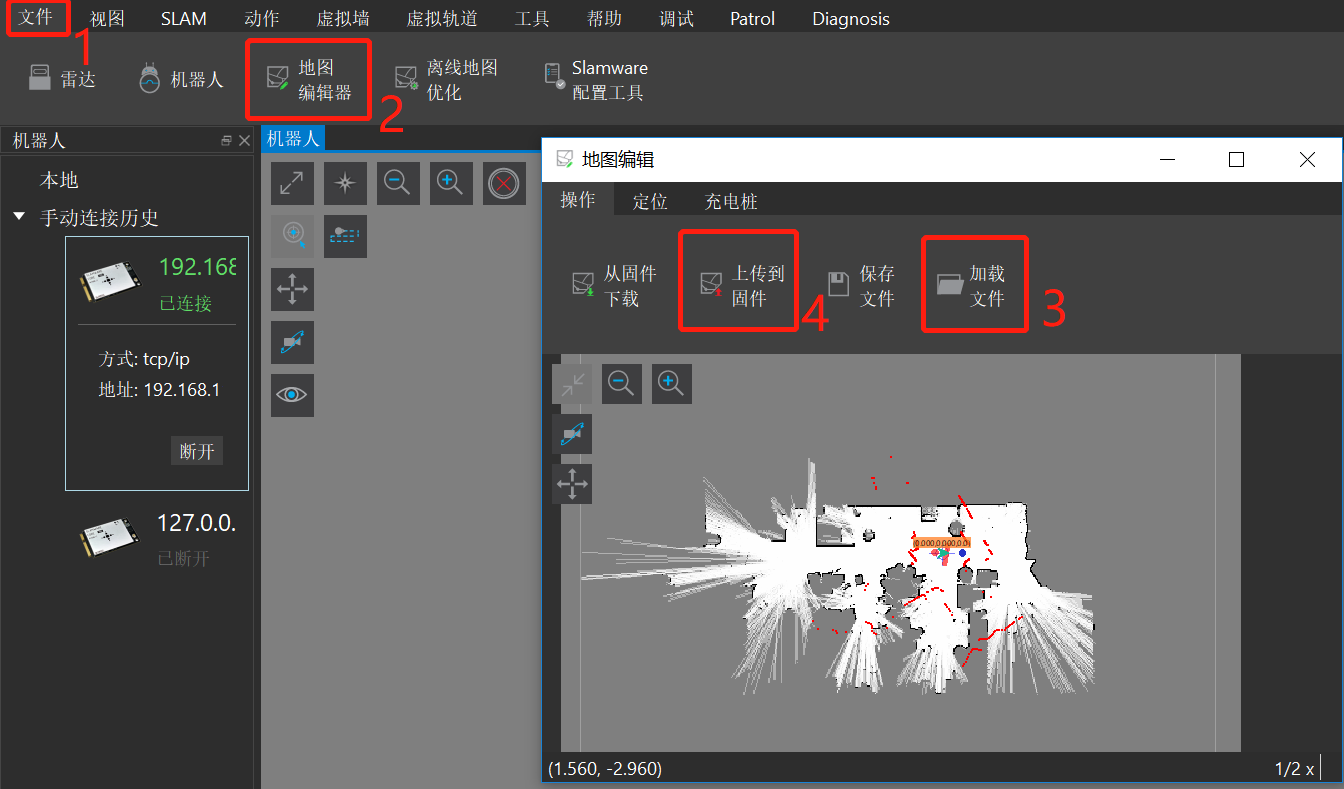
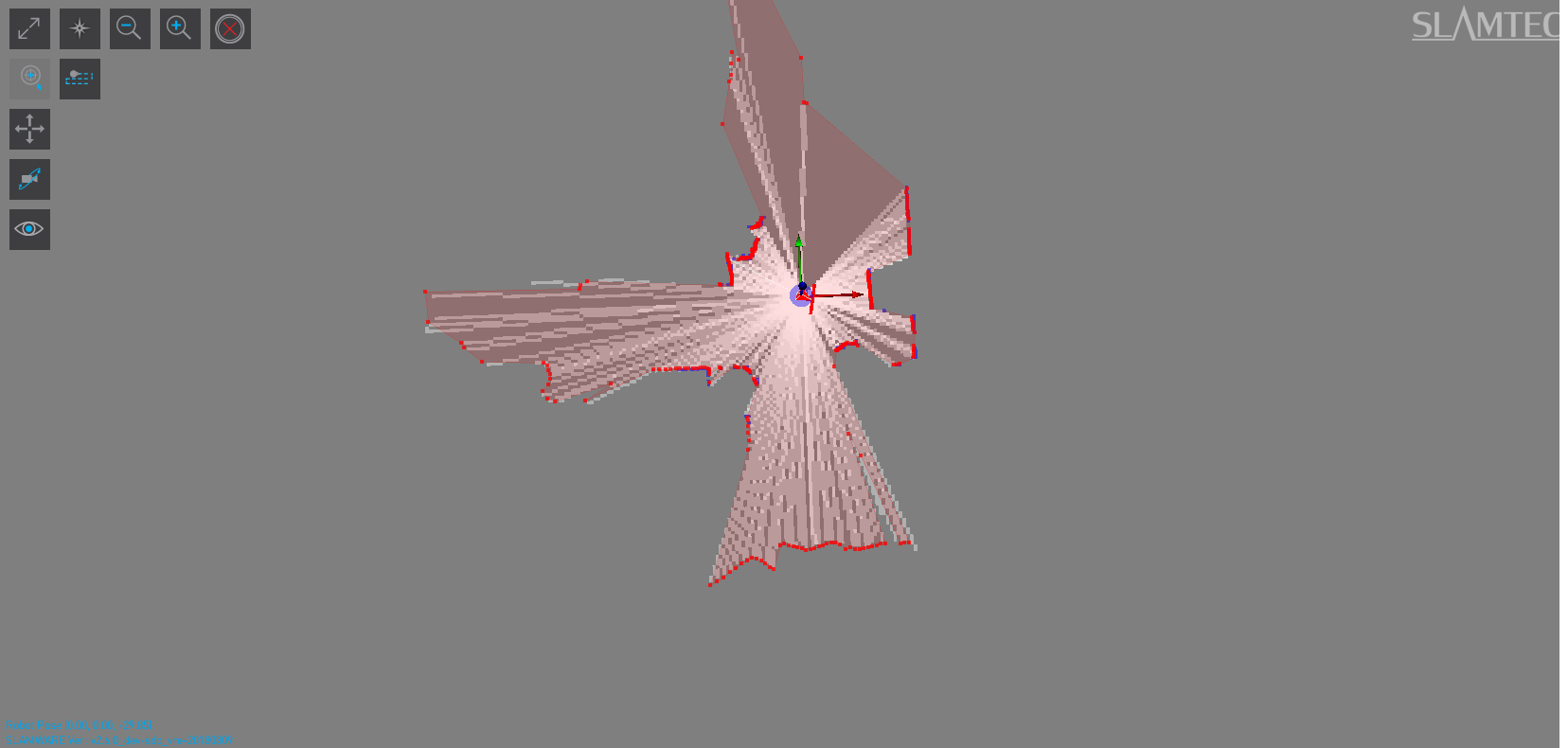
加载完毕后,机器人会重置到坐标轴原点,机器人的实际角度与地图坐标系一般都会有一定偏差,如下图所示。这也是为什么要进行重定位的原因。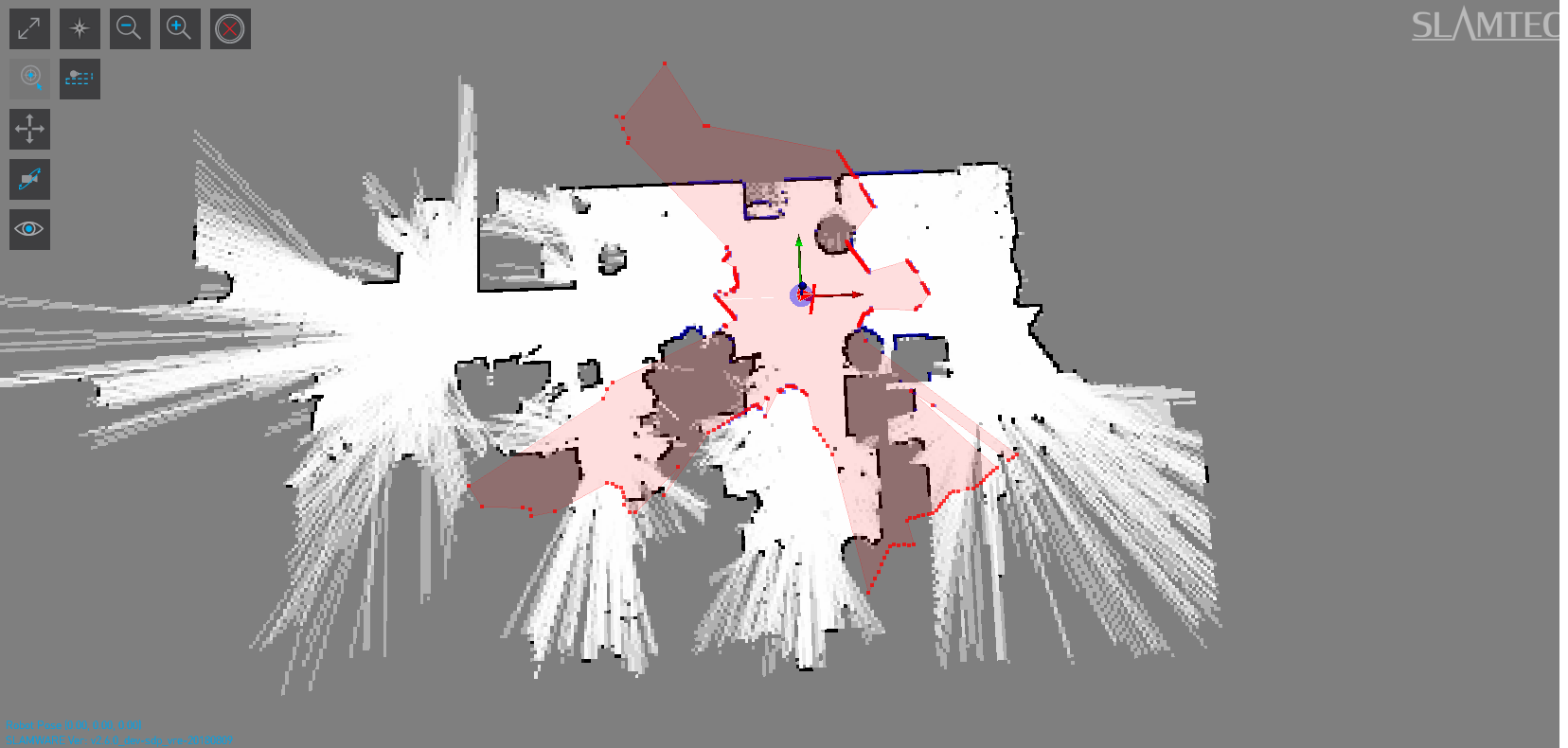
- 重定位
在SLAM选项里面,“重定位”操作以后,机器人的坐标系将会匹配到地图坐标系。之后就可以在加载的地图上进行导航运动了。Multimedia name bandicam 2018-08-10 16-58-15-527.mp4
使用接口加载地图
1.使用接口加载stcm/bmp格式地图的示例代码可以参考:KBSW180120 Win32-CompositeMap格式地图的读写
| Info |
|---|
注意:loadfile()接口以及setcompositmap()接口之间需要一定时间间隔,否则系统可能会抛异常。 |
2.重定位可以参考:KBSW180130 Win32-重定位