本页面介绍了如何快速连接SLAMWARE套件各组件并将套件连接至电脑。可作为首次使用SLAMWARE 套件进行开发时的入门指南。
第一步:硬件连接
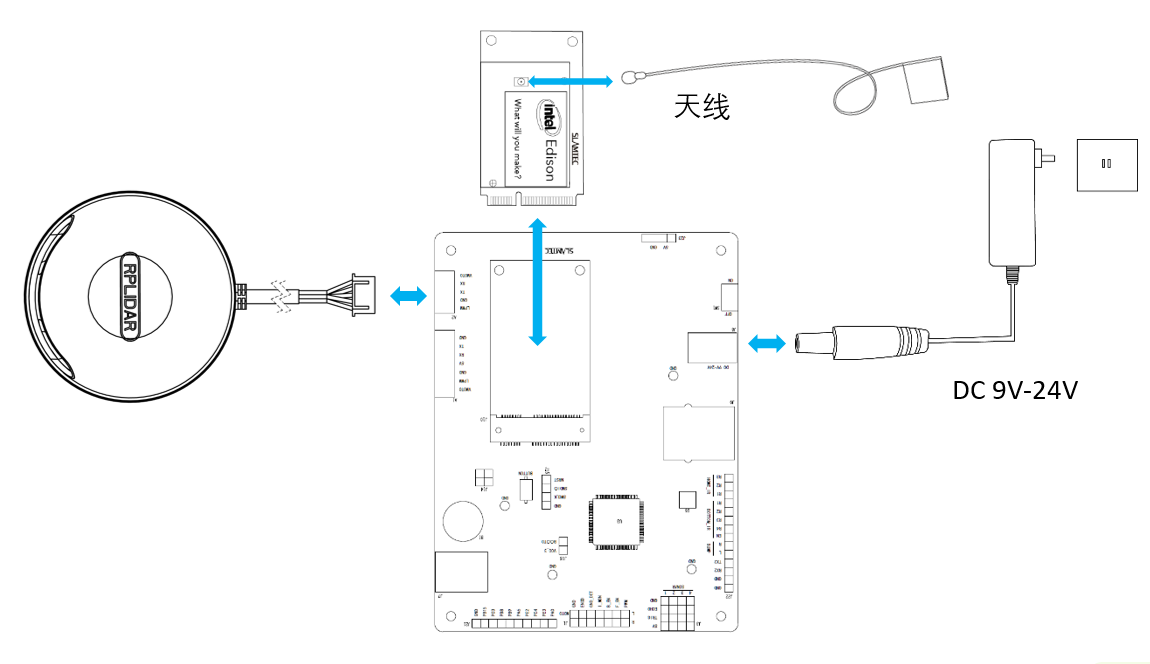
请将套装中SLAMWARE Breakout取出并放置于平整台面上,将SLAMWARE核心模块插入MINI PCI-E插槽(J10接口)并固定(螺丝型号:M2*4),将RPLIDAR A2连接至Breakout的A2接口,将电源适配器连接至Breakout的电源接口(J8接口)。如下图:
第二步:启动并连接至电脑
将Breakout开关(SW1)拨至ON启动设备,指示灯(D1)亮红色,同时Breakout发出滴滴声,约30秒后雷达开始转动,此时设备正常启动。
第三步:下载并使用SLAMWARE SDK
- 请至SLAMTEC官方网站下载最新SLAMWARE SDK。
- 当设备正常启动后,打开您电脑的无线网络适配器,您将看到热点 SLAMWARE-XXXXXX “ 。
- 请使用无线网卡连接至“SLAMWARE-XXXXXX”(您也可以使用有线网络连接SLAMWARE Breakout至电脑,此时PC端网络适配器需设置成DHCP模式),并使用SDK包中bin目录下的Robot Studio连接系统,默认IP为 192.168.11.1,连接成功之后,Robot Studio界面将出现RPLIDAR扫描到的地图。该工具主要用于观察设备性能及进行调试。
