本页介绍了禁行区域插件的获取、使用与管理。
本页内容
概述
仓储环境中,为了避免机器人碰到货架,设置了虚拟墙作为边界保护。但是,这种保护存在一个缺陷,当机器人在搬运货物的过程中,由于某种原因,可能是被其它机器人挤进去,或者被人为推进去之后,现有的虚拟墙规则会导致其无法判断当前在自由区还是禁区,从而无法到达原定的任务目标点。为了能够避免类似问题,RoboStudio提供了禁行区域管理功能,使得机器人能够自行判断是否处于禁区内,进而可以自主逃脱禁区。除了仓储环境,该功能也适合保护玻璃展柜、楼梯口等区域。
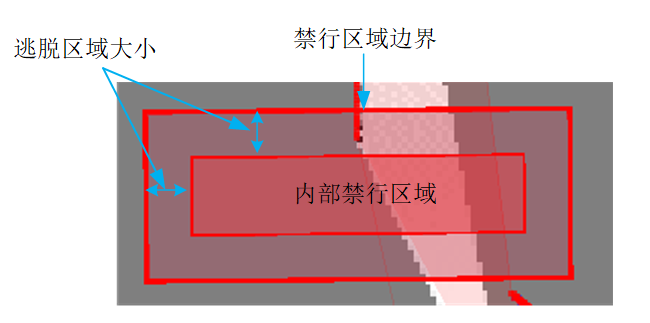
禁区所表达的含义是这块区域越往中心越危险,因此禁区主要由两部分组成:可逃脱区域和核心区域,当机器人在可逃脱区域时,会尝试规划一条远离核心区的路径来逃脱禁区,如果机器人进入了核心区域,则会彻底停止移动。
下载安装
禁行区域管理功能依赖于Slamware Forbidden Area插件。Slamware Forbidden Area是公共插件,电脑与外网连接,登陆RoboStudio后,点击工具->插件->商店->所有->Slamware Forbidden Area->获取->下载->重启RoboStudio。

插件正常运行后,连接上机器,可以在菜单栏看到“禁行区域”工具栏。

禁行区域管理
添加
在菜单-工具栏区域依次点击“禁行区域-添加”,点亮添加禁行区域功能之后,单击鼠标左键,在地图拖拽数据会有一个绿色的直线,松开鼠标之后,会出现一个弹窗,如下图所示。
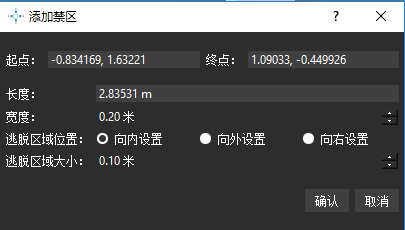
1)添加禁行区域弹窗中各个控件说明
“起点”: 用户单击时,光标在地图上的位置;
“终点”: 用户松开鼠标时,光标在地图上的位置;
“长度”: 起点和终点之间的欧式距离;
“宽度”: 可以由用户更改,表示禁行区域或者内部禁行区域的宽度;
“逃脱区域位置”: 详情见2);
“逃脱区域大小”: 表示禁行区域中内部禁行区域和禁行区域边界之间的距离,如下图所示;
“确认”: 确认向地图添加禁行区域;
“取消”: 取消添加禁行区域操作;
2)逃脱区域位置说明
添加禁行区域时设置逃脱区域位置有三种模式,分别是“向内设置”,“向外设置”和“向外设置”下面分别进行介绍。
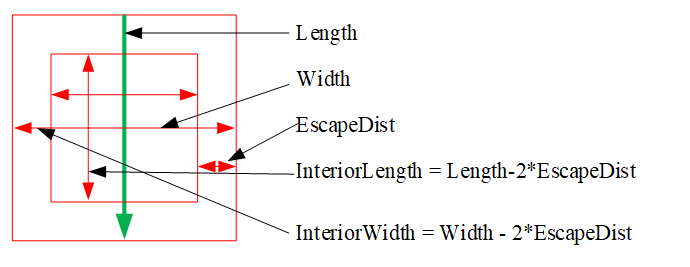
这里为了更好的说明,引入一些符号,以便更好说明。
内容 | 符号 |
禁行区域边界的长 | ExteriorLength |
禁行区域边界的宽 | ExteriorWidth |
内部禁行区域的长 | InteriorLength |
内部禁行区域边界的宽 | InteriorWidth |
逃脱区域大小 | EscapeDist |
添加禁行区域弹窗中的长度 | Length |
添加禁行区域弹窗中的宽度 | Width |
a)向内设置
该模式下内部禁行区域和整个禁行区域的中心为用户添加拖拽的直线的中心,内部禁行区域和禁行区域的长和宽如下所示:
ExteriorLength=Length
ExteriorWidth=Width
InteriorLength=Length-2*EscapeDist
InteriorWifth=Width-2*EscapeDist
b)向外设置
该模式下内部禁行区域和整个禁行区域的中心为用户添加拖拽的直线的中心,内部禁行区域和禁行区域的长和宽如下所示:
ExteriorLength=Length+2*EscapeDist
ExteriorWidth=Width+2*EscapeDist
InteriorLength=Length
InteriorWidth=Width

c)向右设置
该模式下从起点往终点方向,禁行区域在右边,内部禁行区域和整个禁行区域的关系以及内部禁行区域和禁行区域的长和宽如下所示:

选择
在菜单-工具栏区域依次点击“禁行区域-选择”,鼠标会变为黑色十字,左击拖拽鼠标,将要选择的整个禁行区域框住,禁行区域就会由红色变为紫色。
移除
选中禁行区域后,点击“移除”即可将被选中的禁行区域删除。
清空
在菜单-工具栏区域依次点击“禁行区域-移除”,当前地图中的所有禁行区域都会被删除。
实际效果
1.正常情况下,机器无法导航至禁行区域。
2.当机器位于可逃脱区域,设定一个可到达的目标点,机器会规划一条脱离禁行区域并导航至目标点的路径。
3.当机器位于内部禁行区域(核心区域),设定一个可到达的目标点,机器无法运动。