On this page, we will introduce the SDP Mini and its specification, related tools and other development resources.
On this page
Introduction
Overview
The SDP Mini is a small-size development platform designed by SLAMTEC for evaluating the performance of modular autonomous robot localization and navigation solution(SLAMWARE solution for short).
It is assembled by key components including SLAMWARE Core, RPLIDAR A2 and Breakout 3.0 board, and requires only 8 AA batteries to run well without concerns about batteries and charging.
The SDK of SDP Mini, supported to run in Windows/Linux/IOS and Android environment, integrates the whole SLAMWARE solution and extra reserved sensor interfaces.
With SDP Mini, users can have a general understanding about the SLAMWARE solution and examine its basic performance. Run as the most compact structure which realizes the basic SLAMWARE solution, it is suitable for the preliminary evaluation of SLAMWARE solution or the development of robots with basic needs for localization and navigation function.
Key components

SLAMWARE Core
It provides autonomous localization and navigation based on RPLIDAR and supports for communicating the navigation information via serial port and Ethernet bus.
For detailed specification, please refer to SD001 SLAMWARE Core Datasheet。
SLAMWARE Breakout 3.0
As a shield for SLAMWARE Core, it provides the interfaces that can connect directly to RPLIDAR, network, PC, motor and varies sensors, which facilitates the software and hardware development based on the SLAMWARE Core.
RPLIDAR A2
It performs 2D 360-degree LIDAR scan in a range, and the generated 2D point cloud data can be used in mapping, localization and object/environment modeling. In SDP Mini, it provides raw data of the environment for SLAMWARE Core to analyze and handle.
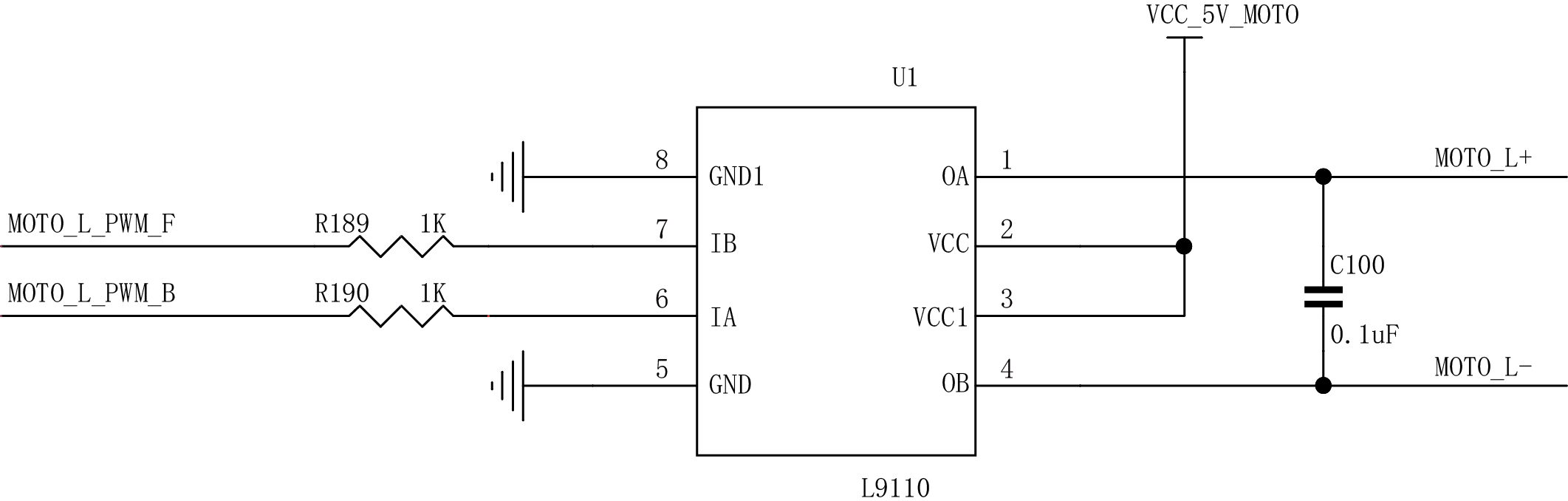
Motor
The brush motor, with a simple schematic diagram, realizes the moving function of SAMWARE solution in SDP Mini, and it is easy to launch, control or improve.
The diagram is as below:
Specification
Item | Index | Parameter |
|---|---|---|
Dimension & Weight & Material | 最大直径 | 185 mm±5mm |
高度 | 100 mm±5mm | |
净重 | 0.85kg ±0.05kg | |
材质 | 亚克力(上层面板4mm/下层面板5mm) | |
Center of gravity | 高度 | 47mm |
位置 | 圆心向后5mm | |
RPLIDAR A2性能 | 最大扫描半径 | 8m(90%反光率表面) |
地图构建 | 地图分辨率 | 5cm |
最大建图面积 | 视具体使用环境及电池容量 | |
运动性能 | 行走速度 | 0.25m/s |
最大行走速度 | 0.35m/s | |
Interfaces | 硬件接口 | Breakout 3.0 所有接口,详情可参考SLAMWARE 套件使用手册中“相关接口”章节了解详情。 |
软件接口 | SLAMWARETM Windows/Linux/Android/IOS SDK | |
Power dissipation & endurance | Operating current | 0.7A |
Endurance | 2h | |
Power | 8 AA batteries | |
Working environment | Temperature | -10℃ ~ 40℃ |
Humidity | 30% ~ 70% |
Tools and usage
Tools with GUI
Robot Studio
SLAMWARE 设计有Robot Studio,一款极为友好的电脑端图形界面工具,涵盖了SLAMWARE解决方案的绝大部分功能操作,用户使用该工具连接至设备,即可对设备进行建图,运动,导航,虚拟墙等一系列操作。
了解Robot Studio功能,请参考SQ002 Robot Studio Cheat Sheet。
SLAMWARE Web Portal
在开发、调试及使用SLAMWARE设备的过程中,有时候需要对设备进行一些操作,如查看基本信息,更新版本,配置WiFi,可视化诊断等,通过Web Portal管理后台即可方便地进行这些操作。
当前该管理后台可支持的操作包括:
- 查看设备信息
- 重启模块
- 更新固件
- WiFi配置
- 开启SLAMWARE Core诊断模式
- 修改管理员密码
请参考SQ001 SLAMWARE Web Portal Function Overview了解该管理后台所有功能及使用方法。
Mobile application
SLAMTEC设计有可分别运行在ios和Android设备上的应用程序,涵盖了定位导航机器人所需要的基本建图和运动控制功能,添加好需要操控的设备即可对设备进行一系列控制,方便用户对解决方案进行评估和调试。
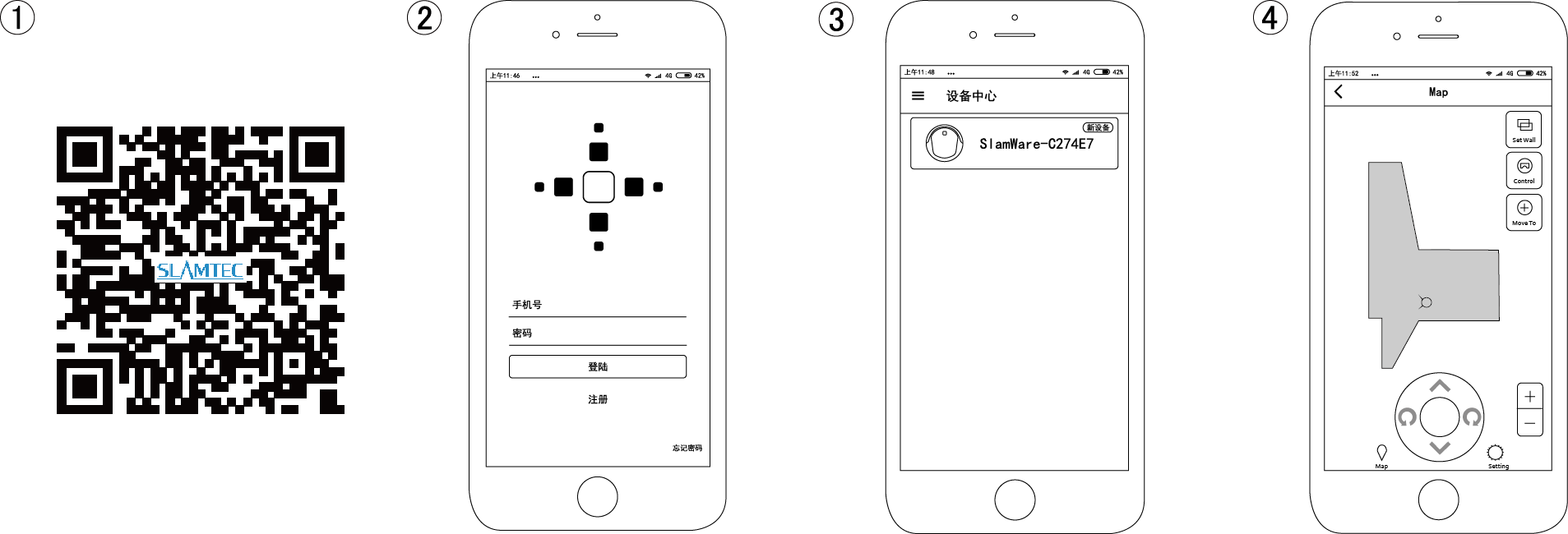
设备型号支持:
Other tools
Slamware Console
Slamware Console是配套Slamware解决方案使用的一个命令行开发工具。这个工具的主要用途是调试您底盘的Control Bus协议实现是否正确。同时也可以用来诊断您的底盘上的各个传感器的状态,以及里程计和轮子的数据。请参考SA001 SLAMWARE Console Application Note了解详情。
slamware_config_tool
底盘配置工具slamware_config_tool可以设置底盘大小,轮距,自动回充等参数,详情请参考SA004 机器人底盘传感器位置坐标及底盘配置工具的使用。
Reference
Ctrl Bus
关于外部系统将如何通过Control Bus 协议与底盘进行通讯,请参考SR001 SLAMWARE Control Bus Protocol。
SDK API Reference
关于Windows平台开发SLAMWARE SDK的API参考介绍,请参考SR002 SLAMWARE SDK API Reference(Windows);
关于SLAMWARE SDK 中坐标系及地图数据类型的介绍,请参考SA002 Introduction for Coordinate System and Map Data in SLAMWARE SDK;
关于机器人底盘电机里程计的介绍,用法和代码示例,请参考SA003 基于SLAMWARE解决方案的服务型机器人底盘电机里程计概述及代码示例;
关于如何使用SLAMWARE SDK实现机器人的运动控制及其返回状态判断,请参考SA006 使用Slamware SDK实现机器人的运动控制及其返回状态判断
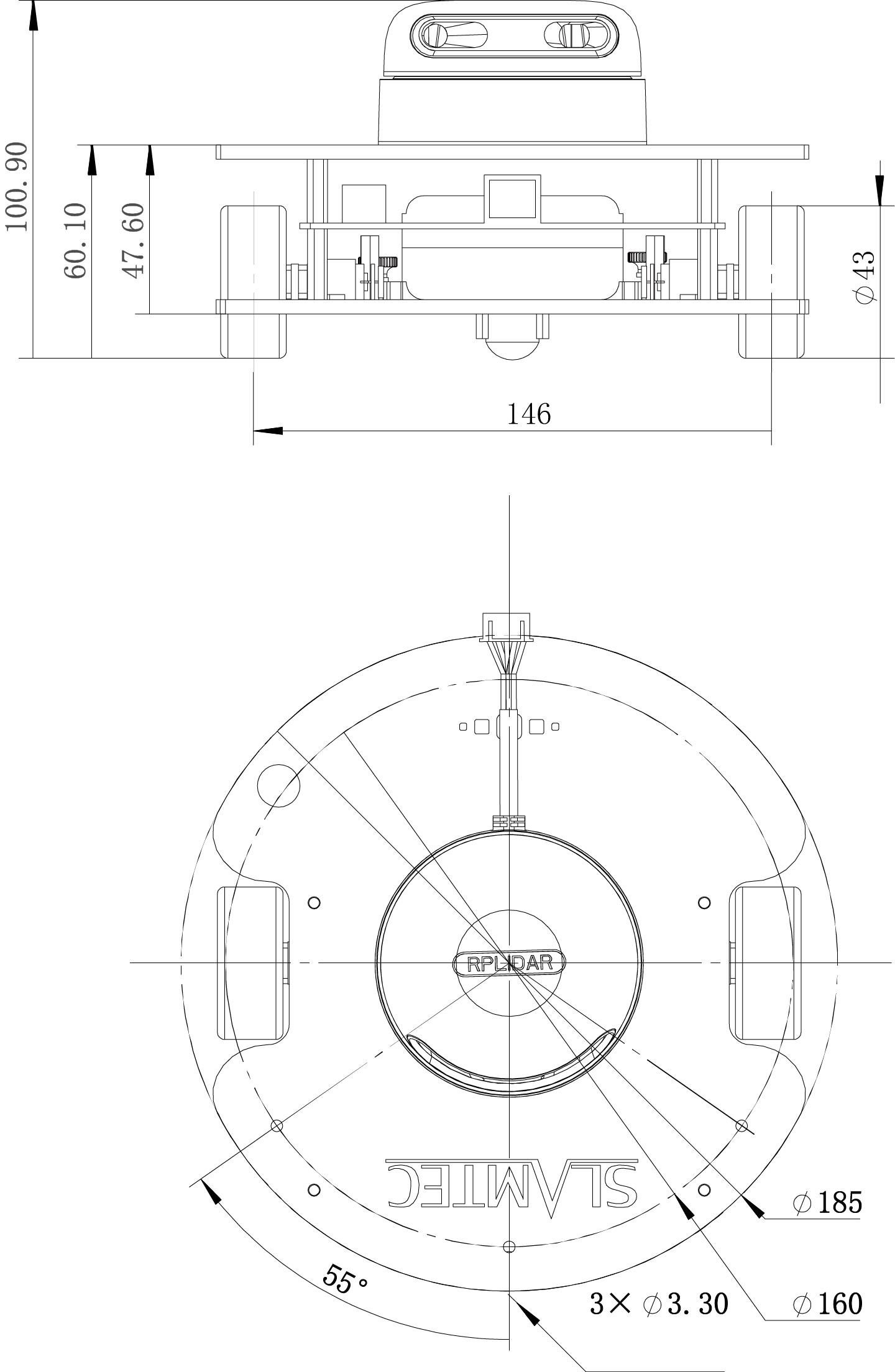
Mechanical dimensions
FAQ
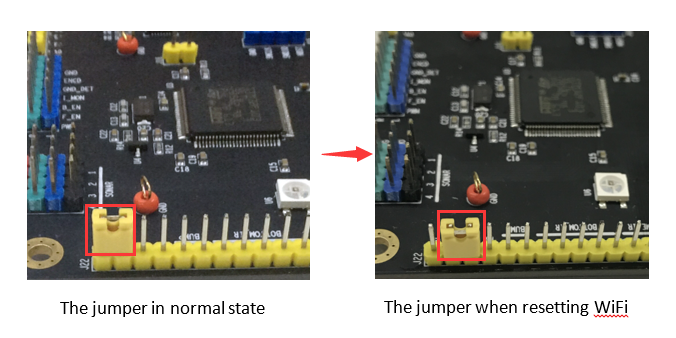
- When the network changes, how to switch the Station mode back to AP mode so that we can reassign the ip address?
As shown below, remove the jumper in J22 on Breakout 3.0 board of SDP Mini and put it on the GND pin and RX2 pin of the same interface, then restart the SDP Mini. (Except for the buzz of normal launch, the SDP Mini will emit a longer buzz to indicate a successful WiFi reset. )
After resetting, please put the jumper back to normal state to ensure that the SDP Mini will work well later.
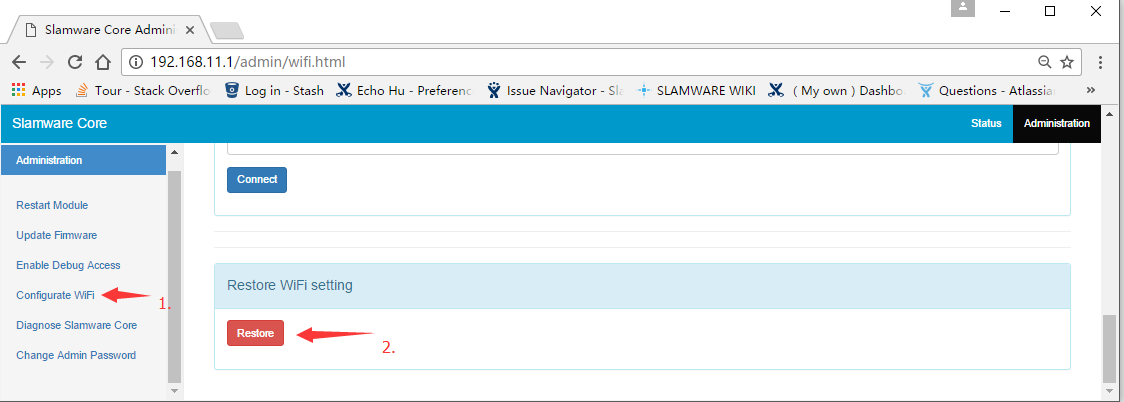
- After launching the SDP Mini, connect it to the computer with network cable, and then login to 192.168.11.1 in Chrome(Default username: admin; default password: admin111). Go to Administration on the upper right corner of the page → choose Configure WiFi on the left panel → choose Restore button in the bottom of the page.
Related pages
If you are a new comer for SLAMTEC products, please turn to SQ103 SLAMWARE SDP Mini Quick Start first;
For more help, please contact support@slamtec.com.