概述
本文将介绍基于Slamware解决方案的激光回充和红外回充的参考设计,在设计机器人回充方案时,可以参照本文中提供的设计要求进行设计。
激光回充方案原理及设计要求
Zeus底盘激光回充方案视频:
http://v.youku.com/v_show/id_XMTYyNTA1Nzg3Ng==.html?from=s1.8-1-1.2&spm=a2h0k.8191407.0.0
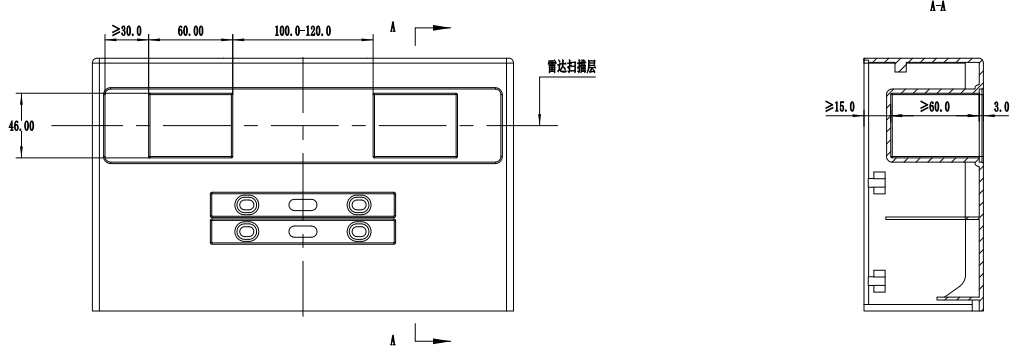
充电底座设计参考(单位mm):
注意
机器人端激光雷达的扫描平面应该在图示充电桩上方开槽的中心线位置,开槽的尺寸如上图所示。Slamware通过激光雷达来识别充电桩上开槽的位置和深度等信息,从而进行对准和回充判断。充电桩待识别区域材料应是反光率大于等于80%的非镜面材料,如若需要在开槽表面覆盖透明材料,此材料需要是红外高透材料(RPLIDAR采用785nm波段红外)。
红外回充方案原理及设计要求
Slamware SDP 红外自动回充方案视频:
http://v.youku.com/v_show/id_XMTYyNTA1ODc3Ng==.html?from=s1.8-1-1.2&spm=a2h0k.8191407.0.0
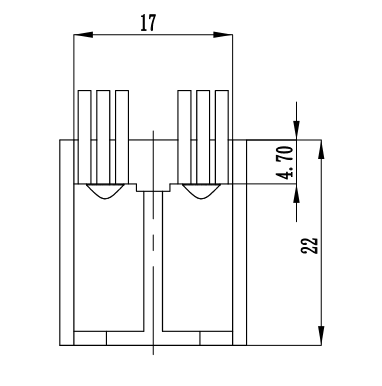
充电桩发射端参考设计(单位mm):
注意
下图为充电桩红外发射端的结构,下方有两个孔槽,分别内置一个红外线发射管(可用5mm草帽型红外线发射管),此两个孔槽尺寸尺寸见下图。此左右两个红外发射端主要用于定位对准,中间的红外发射管的主要功能是防止机器人在未对准的情况下,进入充电底座区域。
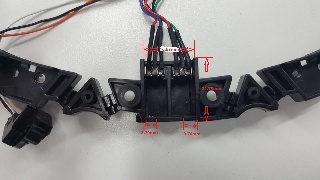
充电桩实际结构及红外发射管参考:


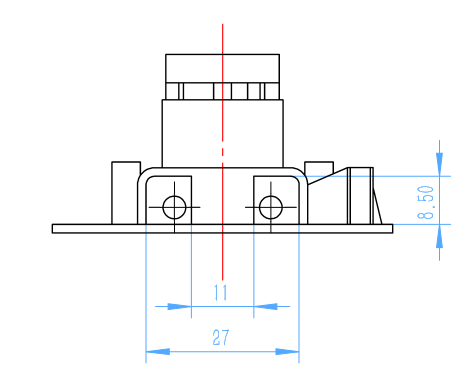
接收端参考设计(单位mm):
注意
左右红外接收端孔槽的尺寸请参考下图,可用一体化红外接收头来做接收端。
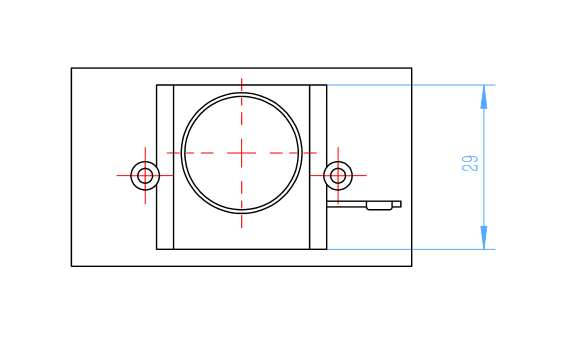
俯视图:
平视图:


中间红外接收端结构和红外接收模块参考:

