Slamware建图系统使用说明
1.背景说明
当前服务型机器人在使用自动定位和导航功能前我们通常先给机器人设置一张反映真实环境的地图。而这张地图依赖于我们人工控制机器人在所使用的环境中有规则的行走,并通过机器人身上的眼睛(雷达)和小脑(软件算法)以及结合相关软件工具而生成。
因为地图的好坏能直接影响机器人在环境中的定位和导航能力,所以事先按照指定的方法建立一张符合要求的地图事关重要。
机器人运行的环境按照使用面积来划分有大有小。通常家用场景一般面积不超过200平米,普通超市的面积有上千平米,但在大商场比如居然之家、红星美凯龙等,一层楼的面积有上万平米。对于家用场景,因为面积小环境也不复杂,建图时使用普通的软件算法也能应对。但对于大超市或者大商场面积有上千平米的环境,普通的软件算法暴漏了一些问题,比如建出来的地图部分区域有重影、错位、扭曲和环形区域不闭合等。为了应对在大面积的环境建图,思岚优化了软件算法和强化了建图引擎,使得在复杂和大面积的场景下也能顺利快速的建出完美的地图。
思岚建图优化引擎引入了回环检测和闭环机制,用户在使用建图系统时需要按照本文档的注意事项和扫图技巧操作。
Slamware图优化系统特定及建图技巧视频:
2.简介
本文档旨在说明如何在测试和部署环节使用思岚建图系统建图,在使用过程中需要注意的事项和遵循的规则。适用于测试和现场部署人员查看。
3.建图系统组成
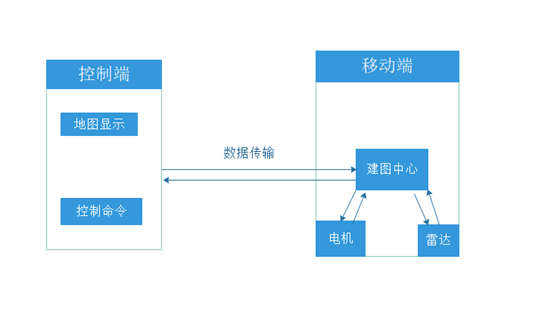
思岚建图系统由三部分组成:
1, 控制端。
2, 移动端
3, 建图中心
控制端指移动设备和Robostudio软件,移动设备可以是PC机、手机或者PAD,Robostudio运行在移动设备之上,负责控制机器人移动以及显示地图数据。
移动端指机器人,机器人具有移动能力,比如通过电机和轮子前后左右移动。
建图中心指slamware core硬件模块及slamware软件。建图中心一般存在和运行于机器人身上,负责接收和响应控制端的命令,并将部分命令下发给移动端,以及将地图数据传输给控制端,由控制端呈现地图。从而建图中心也是连接控制端和移动端的桥梁,控制端和移动端通过wifi或者以太网方式与建图中心建立连接,三者关系如下图所示。思岚建图优化引擎是slamware软件的一部分,具有实时存储和纠正地图数据的能力。在建图的过程中地图数据始终存在于建图中心或者说移动端内存里,控制端与建图中心断开连接时地图数据不会丢失,在移动端没有断电的情况下地图数据不会丢失。
4.环境准备
在建图前请准备以下工具和设备:
- Windows系统笔记本电脑一台。要求电脑有无线网卡,能连接wifi热点和有屏幕显示设备。
- 在电脑上下载和安装Robostudio工具。下载地址http://www.slamtec.com/cn/Support#slamware
- 能移动和行走的机器人,机器人安装有雷达以及思岚的slamware core硬件模块。
5.机器人连接和建图
以PC端的robostudio为例介绍如何连接机器人和建立全新的地图。
- 在正式建图前请先在场地当中走一走以便提前熟悉现场环境,初步确定机器人行走的路线后再开始以下步骤。
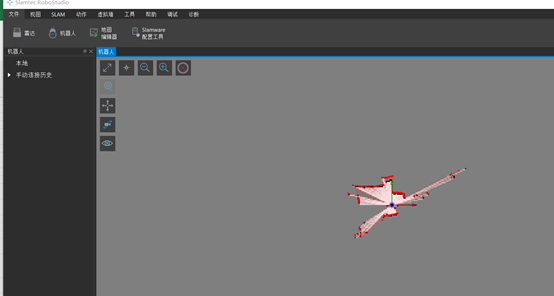
- 机器人上电,PC机搜索机器人的wifi,并连接。Robostudio通过固定IP地址192.168.11.1或者wifi的实际ip地址连接机器人,连接后的界面类似下图所示画面。
- 如果要重新建立全新的地图,请先点击“SLAM”菜单下的“清空地图”按钮,然后通过PC机键盘上的上下左右健控制机器人运动,在运动的过程中,安装于机器人身上的雷达对环境进行扫描,同时建图中心将处理雷达数据并生成地图传送给Robostudio,然后Robostudio实时呈现地图。

注:Robostudio的使用方法请查看《Robotstudio用户手册》
6.建图注意事项
建图过程中建议遵循如下的原则:
• 每次准备建立一张完整的新地图前请点击“清空地图”按钮,否则无法保证建图优化引擎生效。清空地图后“暂停建图”按钮自动没有选上。
• 采用较低的速度,建议小于0.5m/s,速度视当前平台机能而定 。
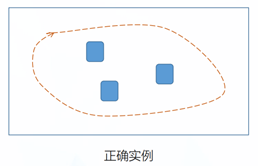
• 多走产生闭环的环路。
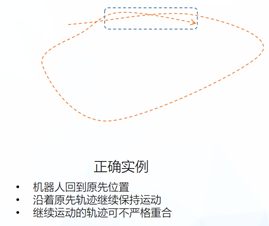
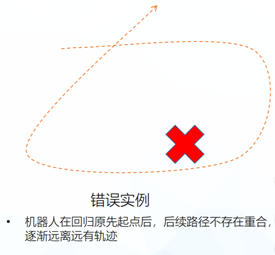
• 环路回到原点后,保持机器人运动,多走重合的路。不可立刻停止移动。
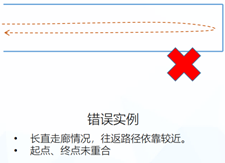
• 环路回到原点后,如地图不闭合,则继续行走,直到闭合为止。
• 对已闭合的区域,避免走老路,降低内存消耗。
• 建图过程中请不要点击“暂停建图“按钮。在完成建图前请不要编辑地图,不要添加虚拟墙、虚拟轨道和不要使用橡皮擦功能,在完成建图后请选上“暂停建图”后再做地图编辑相关操作。
6.1举例说明
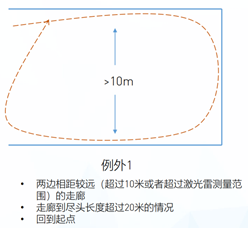
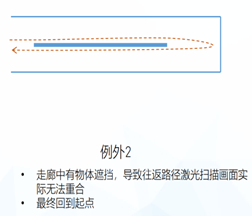
多走产生闭环的环路
环路:区域中出现起点和终点重合,而其他部分存在多处因障碍物导致不重合的行走轨迹
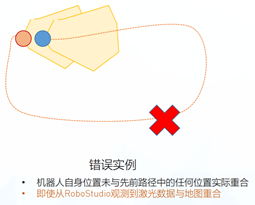
回到起点并保持运动
回到起点:机器人的自身位置回到之前出发的同样位置
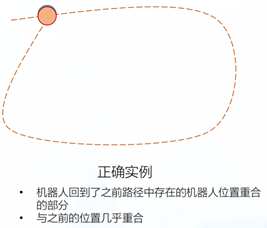
保持运动:在机器人位置达到重合后,继续沿着先前走过的路径前行一段时间。10秒以上,2米以上
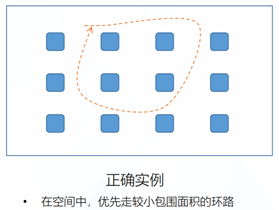
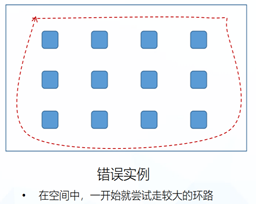
优先走环境较小的环路
较小的环路:环境中包围面积较小的闭合环路
6.2其他
扫图技巧
在扫图的过程中,请尽量不要让机器人走蛇形线、不要倒退,第一遍可以快速的的走一圈让地图闭合。同时请兼顾扫出特征环境,有特征环境的地图数据有利于建图优化引擎识别位置、自身定位以及顺利闭环。特别是在大商场透明玻璃较多的环境下,如果在机器人行进的前方将要路过比较有特征的环境,比如柱子、左右通道、斜着的墙壁等,可以在合适的位置停下来然后向着特征位置原地旋转,等雷达扫出了特征环境后再旋转回来继续前进。但旋转的过程中尽量不要后退。
对于闭环比较困难的某些环形区域,如果尝试让机器人重新路过特征位置处(属于环形区域一部分)将对闭环有很大帮助,并且路过的过程中也可以停下来原地旋转让机器人正对特征位置(即有意识的告诉机器人它之前来过这个地方,现在你又到了这个地方了,有印象不?)。
同步地图
Robostudio与机器人连接之后,在机器人扫图的过程中robostudio将实时从机器人端获取地图数据并显示在robostudio界面上。如果实际环境的面积很大,比如超过上万平米,robostudio实时更新的可能只是整张地图的当前区域,之前显示的区域有可能在机器人端已经经过调整和纠正,从而可能与当前区域不衔接或者出现不闭环的情况。

因为存在上述情况的可能性,我们建议用户在每次走过环路的重合区域后可以尝试如下图片中所示的“同步地图”功能用于更新地图,消除robostudio地图上部分区域错位和不闭环的假象。

同步地图前 同步地图后
地图完善
当整个环境基本的地图轮廓建立完成,并且判断各个区域没有出现无法闭环、错位等情况后请保存地图数据(例如stcm文件)。然后如果地图体现环境不够完善或者特征点不够,可以在原来的基础上继续控制机器人行走于走过的区域扩充特征或者扫除阴影。完善地图分如下两种情况:
- 第一次保存完地图文件后继续完善。
- 通过“地图编辑器“加载之前的地图继续完善。
建议只有在万不得已的情况下才使用第二种方式完善地图,因为加载地图后建图优化引擎的优化功能会自动关闭。例如在继续完善地图的过程中发现某些区域发生无法纠正的偏差,然后才加载上次认为OK的地图文件重新完善地图。
第二种情况的操作方法是:点击“地图编辑器”重新加载stcm文件并重定位,重定位成功后继续扫图(此时注意不要打开“暂停建图“功能),如果对新的地图更加满意,保存最终的地图文件。具体步骤:打开”地图编辑器“—>点击”加载文件“,加载保存的stcm文件—>点击”上传到固件“—>关闭”地图编辑“界面—>关闭”暂停建图“—>控制机器人继续扫图—>保存完善后的地图文件。




7.示例
7.1大型购物和家居中心扫图
典型的大的家居中心有红星美凯龙、居然之家等,典型购物中心有万达广场、万象城、coco park等。这些中心的环境特点是:每层楼面积大,四周玻璃材料使用多,圆环大。
针对面积大的场景,需要按照先小环后大环的原则扫图。如下图所示。
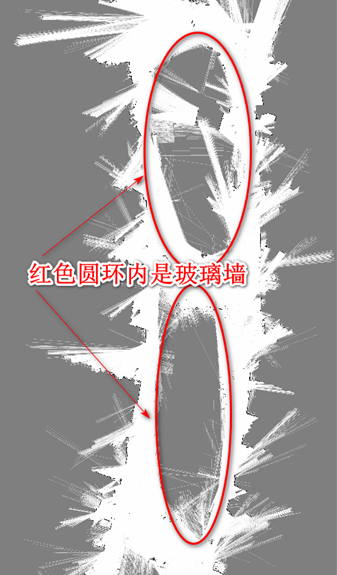
针对四周玻璃材料使用多的场景,如果是透明不易光反射的玻璃,如果机器人使用的是激光雷达,请在条件允许的情况下在玻璃上于雷达高度贴一层增加光反射的膜纸。以及控制机器人行走的时候趋近于不是玻璃的一侧行走。如下图所示,透明玻璃墙没有贴膜纸,激光雷达收到的激光有效数据点很少,不能形成清晰的边界。在圆环两侧是店铺,有一定数量的实体墙,中间过道超过5米,此时建议靠近店铺一侧行走,并且尽量多的扫出店铺一侧的特征。
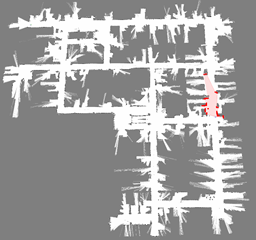
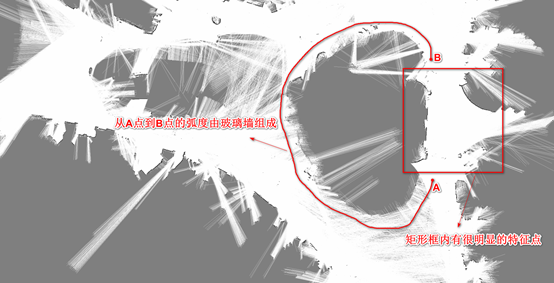
针对大圆环的场景,在控制机器人行走的时候请有意识的扫出大圆环路径上的特征环境,比如柱子、墙壁等,特别是在特征点少的情况下,如果直线行走不能扫出全部特征,可以在到达特征区域时停下来左转或者右转一定角度让机器人扫到并形成特征点后再转回来直线行走。如下图所示,圆环直径超过15米,而且从A点到B点的弧形是透光的玻璃墙,在没有贴膜的情况下激光雷达收到的有效数据点很少,不利于闭环。但在红色矩形框内左侧是电梯区域,右侧是圆弧墙壁,此处是很明显的特征点,所以机器人在经过此处时需要有意的扫出这里的全部特征点。在机器人走过一圈在达到矩形区域内时,又看到这些特征点,因为建图优化引擎记忆了之前的特征点,再次回到这里时能纠正之前累积的计算偏差,从而形成有效闭环,不致于形成一个错位的跟环境不符合的圆环。
大商场环境展示:

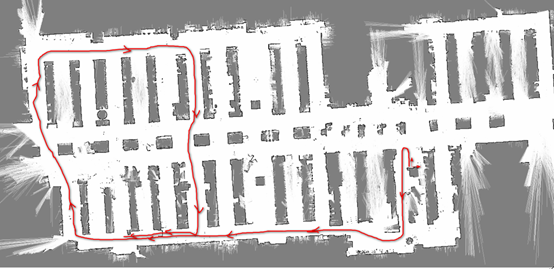
7.2大超市扫图
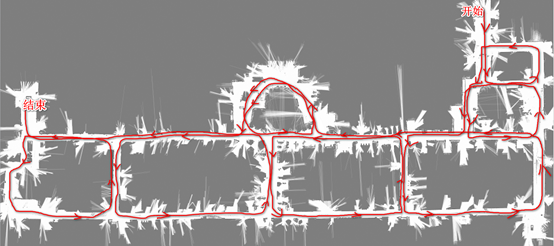
典型的大超市有家乐福、沃尔玛、永辉超市等,这些大超市的环境特点是:宽度一两米左右的长方形货架多,货架四周都有通道,货架自身能形成小圆环,多个货架之家又能形成大一点的圆环。如下图为家乐福超市环境扫出的地图。 面对这种小圆环众多的环境,如果严格按照先小环后大环的方法建图,势必工作量会很大,为了减轻工作量,我们也可以挑选几组小圆环组成一个稍大的圆环,等稍大的圆环闭环后再扫出稍大圆环内部的货架的地形。也可以通过不同的稍大圆环组合而覆盖大部分货架。




大超市环境展示:
