概述
电机部分的控制是机器人底盘实现中,最为主要的部分。对于需要自主定位导航的服务机器人而言,电机里程计的精准度,往往是决定整个机器人定位精度的关键因素之一。因此,本文将概述常见机器人底盘的电机及其编码器并结合breakout 3.0中STM32的参考代码,对slamware系统中用到的里程计进行说明。
代码链接:http://www.slamtec.com/download/slamware/code/slamwarekit_reference_code.20161025.zip
电机编码器类型选择
常用的机器人底盘电机编码器按实现原理来分类,包括光电编码器及霍尔编码器,按照其编码方式分类,主要包括增量型和绝对型。对于基于slamware的机器人底盘来说,里程计的分辨率需要在1mm以下,且总误差最多不能超过5%,如果超过此数值,机器人将无法正常实现定位导航的功能。因此,无论选择哪种编码器,必须要达到其精度的要求。可以参考以下判断公式:

系统电机应答流程
注意
仅以两轮差动电机为例,三轮全向轮电机请参考Slamware解决方案与三全向轮底盘集成指导
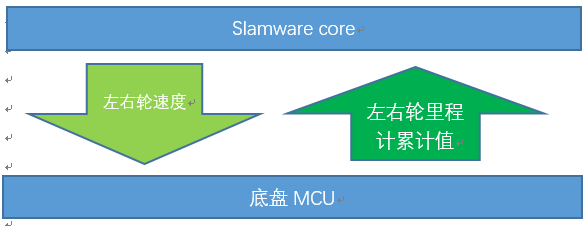
Slamware core 每间隔delta时间,会向底盘发送左右轮的速度,向前为正,向后为负,即SET_BASE_MOTOR(0x40)。底盘会回复此时的左右轮里程计的累计值,即GET_BASE_MOTOR_DATA(0x31)。请注意,无论轮子向前运动或向后运动,里程计的度数均递增,因为slamware core在下发速度的时候,已经区分了向前还是向后。
Slamcore发送SET_BASE_MOTOR的请求报文为, 速度的单位为mm/s:
typedef struct _base_set_motor_request
{
_s32 motor_speed_mm[4];
} __attribute__((packed)) base_set_motor_request_t;
对应下面的代码:
case SLAMWARECORECB_CMD_SET_BASE_MOTOR:
{
base_set_motor_request_t *ans_pkt = (base_set_motor_request_t *) request->payload;
if (!bumpermonitor_filter_motorcmd(ans_pkt->motor_speed_mm[0], ans_pkt->motor_speed_mm[1])) {
set_walkingmotor_speed(ans_pkt->motor_speed_mm[0], ans_pkt->motor_speed_mm[1]);
}
net_send_ans(channel, NULL, 0);
}
break;
底盘会通过响应GET_BASE_MOTOR_DATA, 将左右轮的累计里程发给slamware core, 响应报文为, 距离单位为mm:
typedef struct _base_motor_status_response
{
_s32 motor_cumulate_dist_mm_q16[4];
} __attribute__((packed)) base_motor_status_response_t;
对应的代码:
case SLAMWARECORECB_CMD_GET_BASE_MOTOR_DATA:
{
base_motor_status_response_t ans_pkt;
memset(&ans_pkt, 0, sizeof(ans_pkt));
ans_pkt.motor_cumulate_dist_mm_q16[0] = (_s32) (cumulate_walkingmotor_ldist_mm());
ans_pkt.motor_cumulate_dist_mm_q16[1] = (_s32) (cumulate_walkingmotor_rdist_mm());
net_send_ans(channel, &ans_pkt, sizeof(base_motor_status_response_t));
}
break;
里程计部分代码示例:
每米编码器脉冲数ODOMETER_EST_PULSE_PER_METER,需要根据每转编码器脉冲数以及轮子的直径来确定,公式如下:
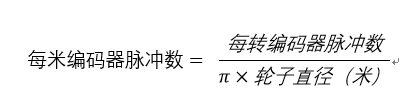
//每米编码器脉冲数
#define ODOMETER_EST_PULSE_PER_METER 6390UL
//行走电机速度控制频率:60hz
#define CONF_MOTOR_HEARTBEAT_FREQ 60
#define CONF_MOTOR_HEARTBEAT_DURATION (1000/(CONF_MOTOR_HEARTBEAT_FREQ))
/*
* 刷新行走电机的里程数据函数
*/
static void _refresh_walkingmotor_odometer(_u32 durationMs)
{
_u32 irqSave = enter_critical_section(); //临界资源保护
for (size_t cnt = 0; cnt < WALKINGMOTOR_CNT; ++cnt) {
_lastEncoderTicksDelta[cnt] = _encoderTicksDelta[cnt]; //获得delta时间内编码器的脉冲数
_motorAccumulatedTicks[cnt] += _encoderTicksDelta[cnt]; //获得累计编码器的脉冲数
_encoderTicksDelta[cnt] = 0;
}
leave_critical_section(irqSave);
if (durationMs == 0) //防止除零
durationMs = 1;
for (size_t cnt = 0; cnt < WALKINGMOTOR_CNT; ++cnt) { //根据delta的编码器数据计算这段时间内速度,即当前速度
_lastOdometerSpeedAbs[cnt] = (float) _lastEncoderTicksDelta[cnt] * (1000.0 / ODOMETER_EST_PULSE_PER_METER) * 1000.0 / durationMs;
}
}
/*
* 计算左行走电机累计里程函数
* 单位:mm
*/
_u32 cumulate_walkingmotor_ldist_mm(void)
{
return (_motorAccumulatedTicks[WALKINGMOTOR_LEFT_ID] * 1000) / ODOMETER_EST_PULSE_PER_METER;
}
/*
* 计算右行走电机累计里程函数
* 单位:mm
*/
_u32 cumulate_walkingmotor_rdist_mm(void)
{
return (_motorAccumulatedTicks[WALKINGMOTOR_RIGHT_ID] * 1000) / ODOMETER_EST_PULSE_PER_METER;
}
里程计测试
可以用slamware_console工具中的run以及vrun命令来测试里程计的准确性,其误差需要在5%以内。
slamware_console工具:http://www.slamtec.com/download/slamware/tools/slamware_console-20161012.zip
slamware_console工具使用指南:SA001 SLAMWARE Console Application Note