| Excerpt |
|---|
This document introduces the demo project of "composite_map_demo", including how to save and load maps of stcm format( composite map). |
Content
| Table of Contents | ||
|---|---|---|
|
IDE Preparation
Software
- Visual Studio 2010 SP1
- Slamware Windows SDK:Slamware Windows SDK
- RoboStudio(for map display):Robostudio installer
Sample Code:
Info Higher version of Visual Studio will cause errors. sometime you will need to upgrade SP1 package to make your VS compatable with .Net Framework.
Hardware
(Either one of following)
- Slamware SDP mini
- Slamware SDP
- Slamware Kit
- Zeus/Apollo robot base
Download
Compiling
Right click on "composite_map_demo" project, set as StartUp project.
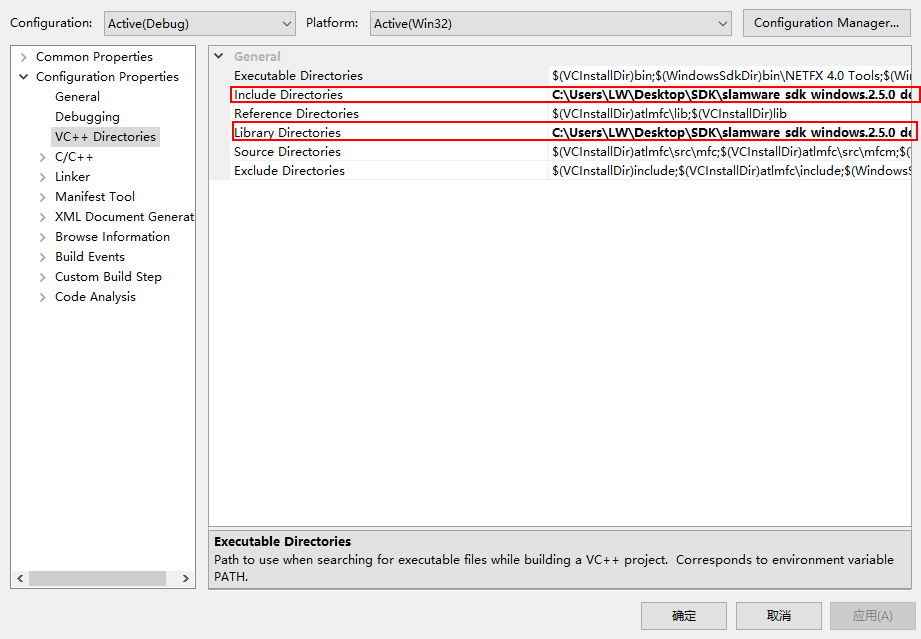
Right click on "composite_map_demo", then " Properties",configure "include" and "lib" directories to the corresponding folder path of Slamware SDK.
Info It's not necessary to copy files to the project directory, user will only need to configure the folder path of SDK.
- Right click on "composite_map_demo", then "properties",set "Command Arguments" as follows:
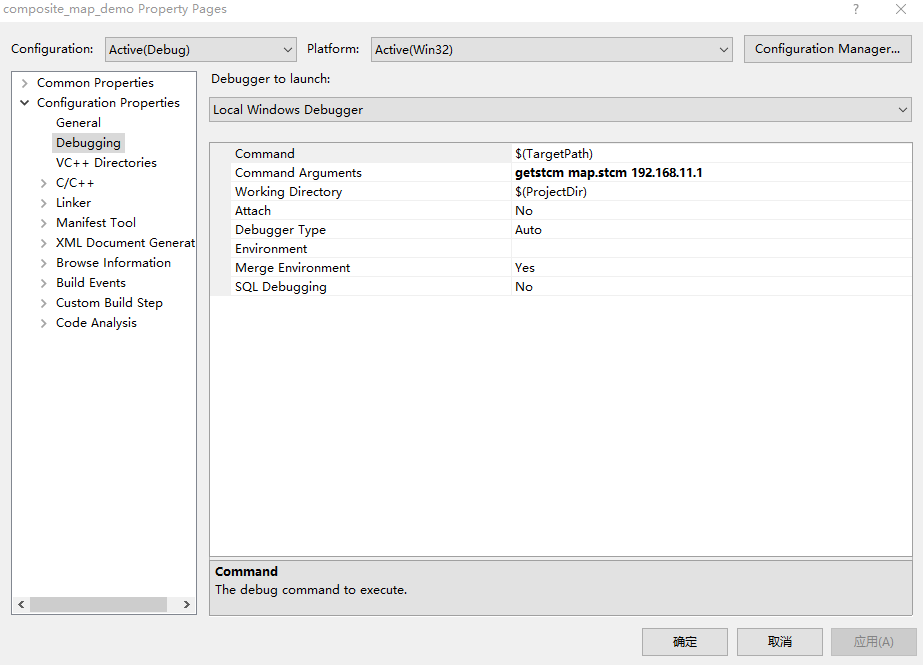
Syntax :composite_map_demo [OPTS] [filename] <SDP IP Address>
SDP IP Address The ip address string of the SLAMWARE SDP
getstcm filename download compositeMap
setstcm filename upload compositeMap
-h Show this message Click " F5" to execute.
- composite_map_demo getstcm map.stcm 192.168.11.1 (load composite map from slamware, and generate a map.stcm file in a defined folder path)
The generated maps could be opened with the " map editor" plug-in of the Robostudio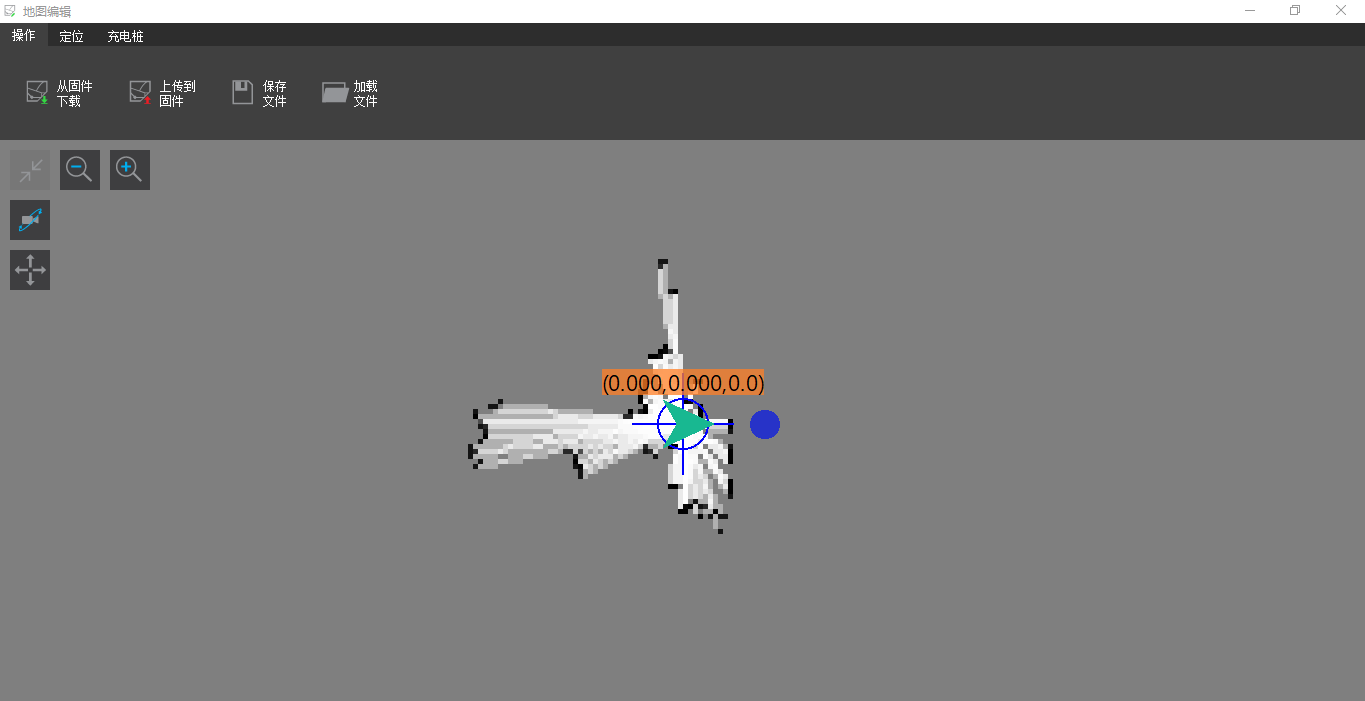
- composite_map_demo setstcm map.stcm 192.168.11.1(upload map.stcm to slamware)
if map is successfully loaded, it will be shown in Robostudio.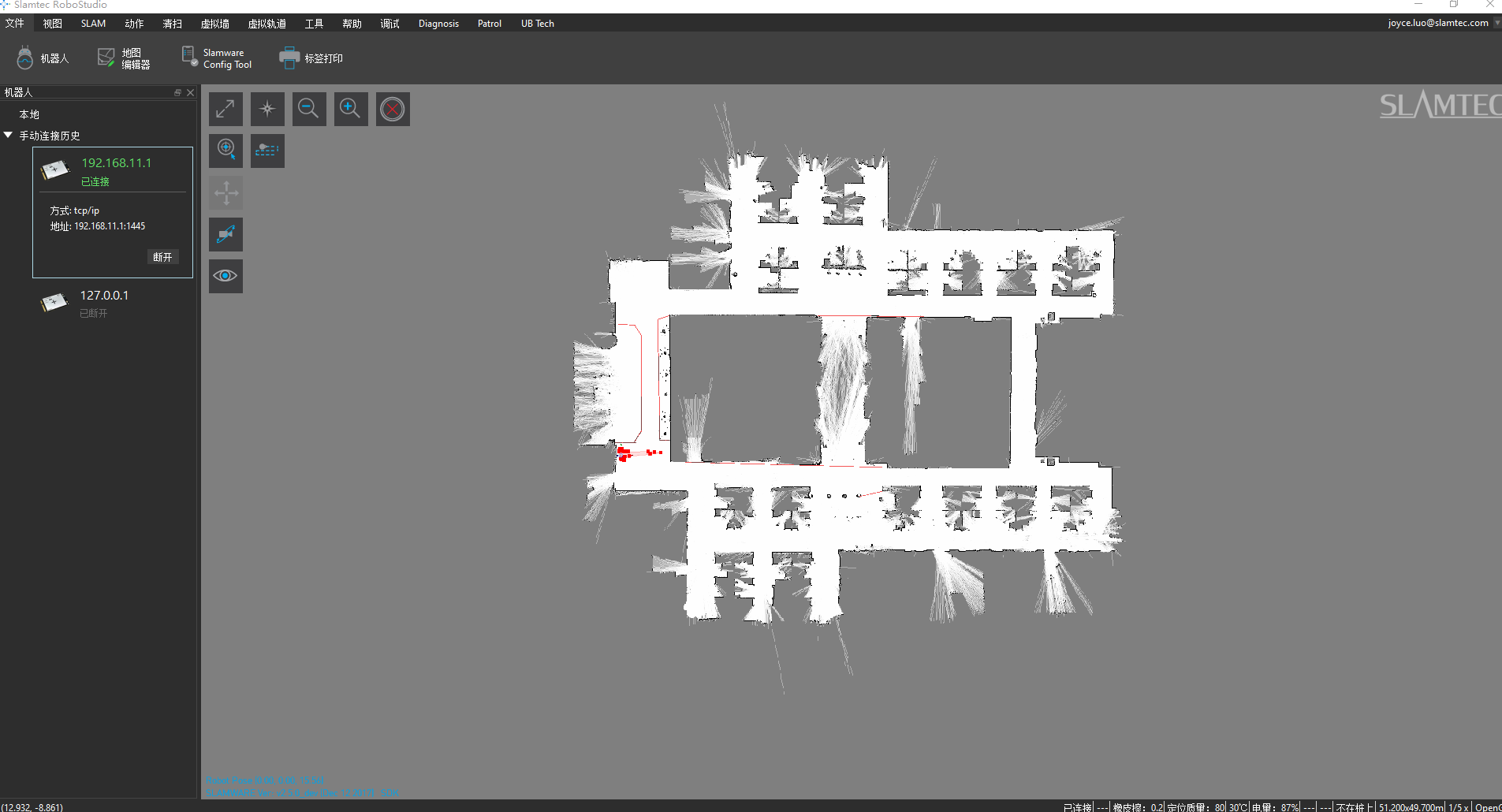
- composite_map_demo getstcm map.stcm 192.168.11.1 (load composite map from slamware, and generate a map.stcm file in a defined folder path)
Code
- Save maps from Slamware to a local directory.
| Code Block | ||||||||
|---|---|---|---|---|---|---|---|---|
| ||||||||
bool StcmMapWriter(const std::string file_name, SlamwareCorePlatform platform) {
CompositeMap composite_map = platform.getCompositeMap();
CompositeMapWriter composite_map_writer;
std::string error_message;
bool result = composite_map_writer.saveFile(error_message, file_name, composite_map);
return result;
} |
- Load composite map from a local directory.
| Code Block | ||||||||
|---|---|---|---|---|---|---|---|---|
| ||||||||
bool StcmMapReader(const std::string file_path, rpos::core::Pose pose, SlamwareCorePlatform platform) {
CompositeMapReader composite_map_reader;
std::string error_message;
boost::shared_ptr<CompositeMap> composite_map(composite_map_reader.loadFile(error_message, file_path));
if (composite_map) {
platform.setCompositeMap((*composite_map), pose);
return true;
}
return false;
} |
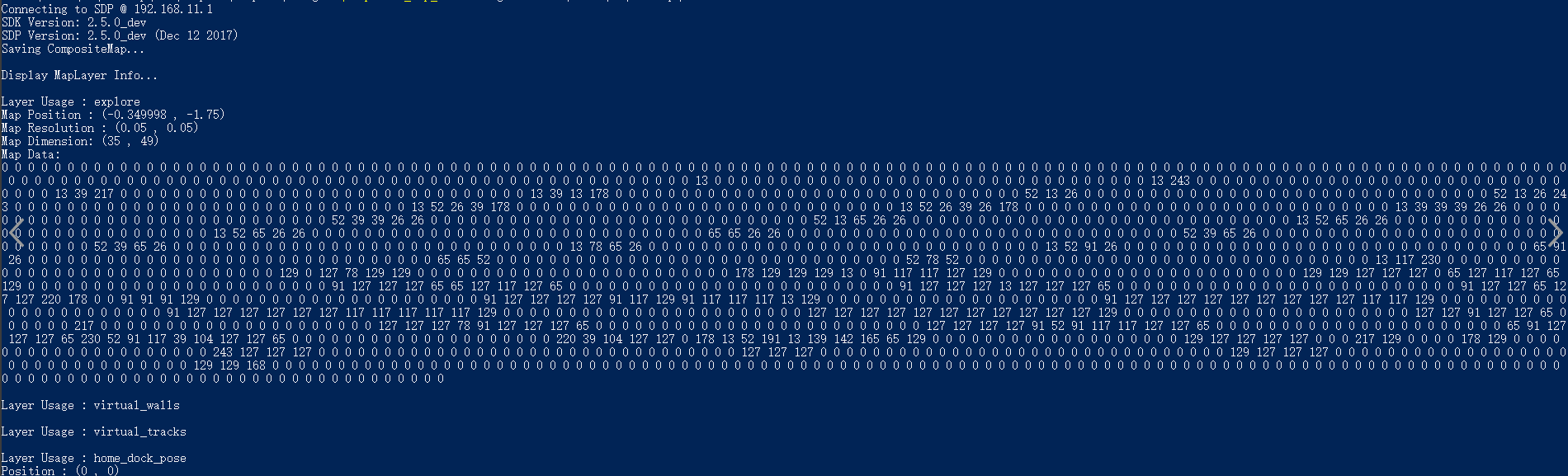
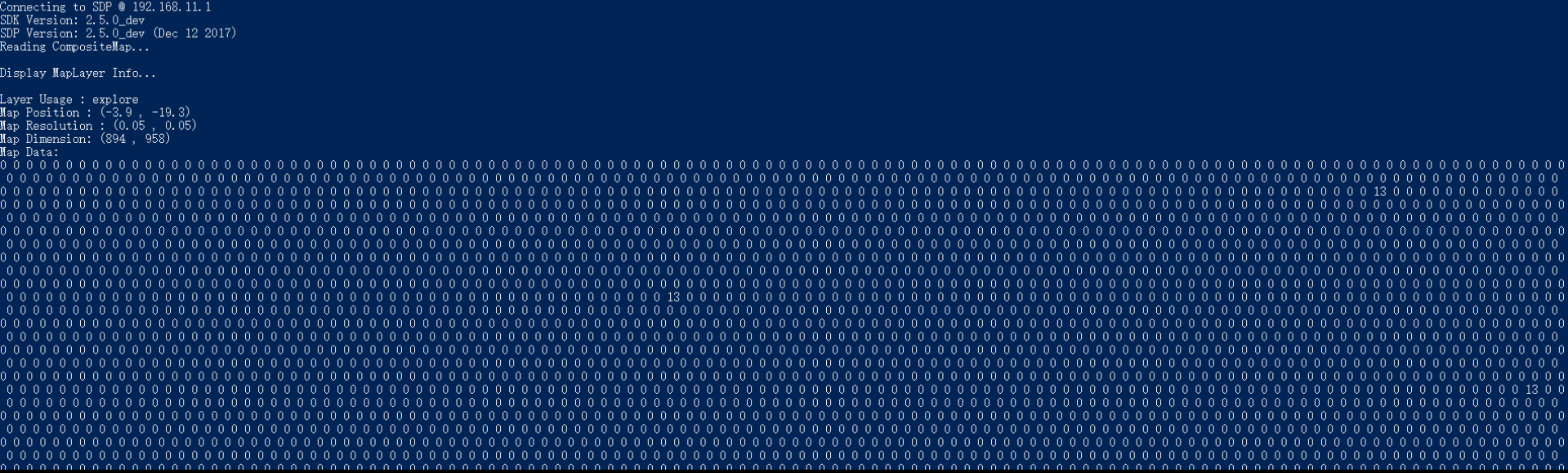
- Display data of different map layers from a composite map, including virtual walls and virtual tracks, etc.
| Code Block | ||||||||
|---|---|---|---|---|---|---|---|---|
| ||||||||
CompositeMapReader composite_map_reader;
std::string error_message;
boost::shared_ptr<CompositeMap> composite_map(composite_map_reader.loadFile(error_message, file_path));
if (composite_map) {
for (auto it = composite_map->maps().begin(); it != composite_map->maps().end(); ++it) {
auto layer = *it;
std::string usage = layer->getUsage();
std::string type = layer->getType();
std::cout << "Layer Usage : " << usage << std::endl;
//get grid map layer
if (type == GridMapLayer::Type) {
auto grid_map = boost::dynamic_pointer_cast<GridMapLayer>(layer);
std::cout << "Map Position : (" << grid_map->getOrigin().x() << " , " <<
grid_map->getOrigin().y() << ")" <<std::endl;
std::cout << "Map Resolution : (" << grid_map->getResolution().x() <<
" , " << grid_map->getResolution().y() << ")" <<std::endl;
std::cout << "Map Dimension: (" << grid_map->getDimension().x() <<
" , " << grid_map->getDimension().y() << ")" <<std::endl;
std::cout << "Map Data:" << std::endl;
for (auto it = grid_map->mapData().begin(); it != grid_map->mapData().end(); ++it) {
std::cout << (int)*it << " " ;
}
std::cout << std::endl << std::endl;
}
//get line map layer
else if (type == LineMapLayer::Type) {
auto line_map = boost::dynamic_pointer_cast<LineMapLayer>(layer);
for (auto it = line_map->lines().begin(); it != line_map->lines().end(); ++it) {
auto line = it->second;
std::cout << "start: (" << line.start.x() << " , " << line.start.y() << ")" << std::endl;
std::cout << "end: (" << line.end.x() << " , " << line.end.y() << ")" << std::endl;
}
std::cout << std::endl;
}
//get pose map layer
else if (type == PoseMapLayer::Type) {
auto pose_map = boost::dynamic_pointer_cast<PoseMapLayer>(layer);
for (auto it = pose_map->poses().begin(); it != pose_map->poses().end(); ++it) {
auto pos = it->second;
std::cout << "Position : (" << pos.pose.x() << " , " << pos.pose.y() << ")" << std::endl;
}
std::cout << std::endl;
}
else if (type == PointsMapLayer::Type) {
//TODO: get Points map layer
std::cout << std::endl;
}
else {
//TODO: get unknown map layer
std::cout << std::endl;
}
} |