...
SLAMWARE
模块化自主定位导航解决方案
API参考手册
| Anchor |
|---|
| _Toc462933606 |
|---|
| _Toc462933606 |
|---|
|
目录目录
SDK内容
目录结构
头文件结构
开发环境要求
创建项目工程
新建工程
配置编译选项
Hello World
API参考
概览
rpos::core::Location类
rpos::core::Rotation类
rpos::core::Pose类
rpos::core::Action类
rpos::core::ActionStatus枚举
rpos::core::Feature类
rpos::core::RectangleF类
rpos::core::Vector2f类
rpos::core::Vector2i类
rpos::core::LaserPoint类
rpos::core::RobotPlatform类
rpos::robot::heading::HeadingMode枚举
rpos::robot::heading::RobotHeading类
rpos::robot::option::MoveOption结构体
rpos::actions::MoveAction类
rpos::features::ArtifactProvider类
rpos::features::LocationProvider类
rpos::features::MotionPlanner类
rpos::features::SweepMotionPlanner类
rpos::features::system_resource::DeviceInfo类
rpos::features::SystemResource类
rpos::features::location_provider::Map类
rpos::features::location_provider::MapType枚举
rpos::features::location_provider::BitmapMap类
rpos::features::location_provider::BitmapMapPixelFormat枚举
rpos::features::motion_planner::Path类
rpos::features::system_resource::LaserScan类
rpos::robot_platforms::SlamwareCorePlatform类
修订历史
附录
图表索引
| Anchor |
|---|
| _Toc462933607 |
|---|
| _Toc462933607 |
|---|
|
SDK内容| Anchor |
|---|
| _Toc462933608 |
|---|
| _Toc462933608 |
|---|
|
目录结构Slamware SDK包含了大量您开发过程中可能会用到的资源、代码、和项目文件,其目录结构组织如下:
...
| Anchor |
|---|
| _Toc462933648 |
|---|
| _Toc462933648 |
|---|
|
图表 1-1 SLAMWARE SDK 目录结构| Anchor |
|---|
| _Toc462933609 |
|---|
| _Toc462933609 |
|---|
|
头文件结构在include目录下,我们包含了Slamware SDK以及它所依赖的所有库的头文件:
...
| Anchor |
|---|
| _Toc462933649 |
|---|
| _Toc462933649 |
|---|
|
图表 1-2 SLAMWARE SDK 头文件组织结构 | Anchor |
|---|
| _Toc462933610 |
|---|
| _Toc462933610 |
|---|
|
开发环境要求要基于Slamware SDK进行应用开发,需要您的开发环境满足如下条件:
- 您的计算机应当安装Visual Studio 2010 SP1(由于我们提供的预编译库采用Visual Studio 2010 SP1进行编译,所以不可使用Visual Studio 2012或者2013进行开发)
| Anchor |
|---|
| _Toc462933611 |
|---|
| _Toc462933611 |
|---|
|
创建项目工程| Anchor |
|---|
| _Toc448250534 |
|---|
| _Toc448250534 |
|---|
|
| Anchor |
|---|
| _Toc462933612 |
|---|
| _Toc462933612 |
|---|
|
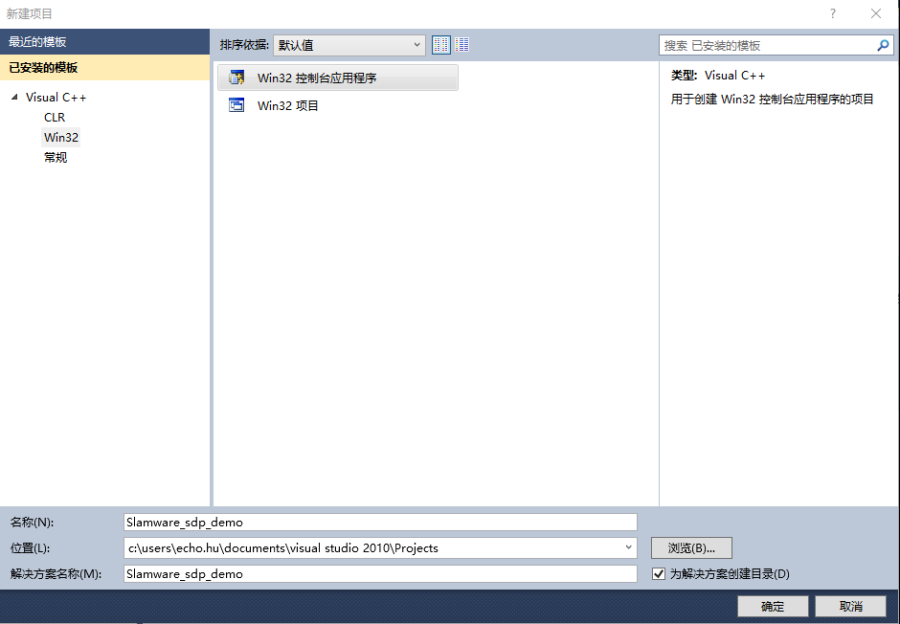
新建工程步骤1 打开Visual Studio 2010并新建项目
| Anchor |
|---|
| _Toc462933650 |
|---|
| _Toc462933650 |
|---|
|
图表3-1 新建项目- 选择Visual C++项目,并选择Win32 Console Application(Win32控制台应用程序)项目类型
- 在Name(名称)中输入项目名称
- 点击OK(确定)
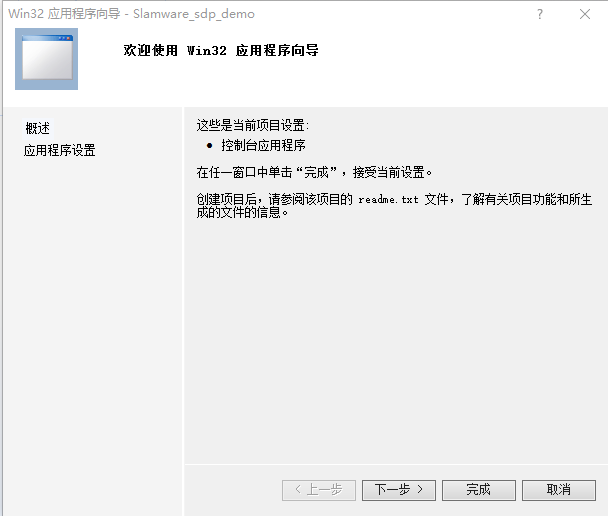
步骤2 设定应用程序选项
| Anchor |
|---|
| _Toc462933651 |
|---|
| _Toc462933651 |
|---|
|
图表3-2 向导概览 点击Next(下一步) 
| Anchor |
|---|
| _Toc462933652 |
|---|
| _Toc462933652 |
|---|
|
图表3-3项目设置- Application Type(应用程序类型)选择Console Application(命令行应用程序)
- Additional options(附加选项)勾选Empty Project(空项目)
- 点击Finish完成项目创建
| Anchor |
|---|
| _Toc448250535 |
|---|
| _Toc448250535 |
|---|
|
| Anchor |
|---|
| _Toc462933613 |
|---|
| _Toc462933613 |
|---|
|
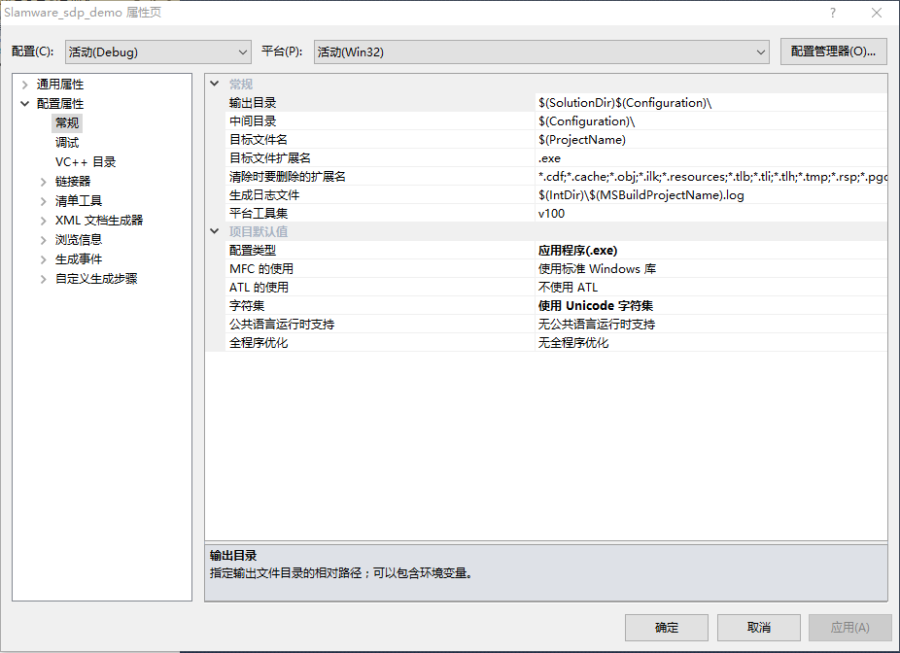
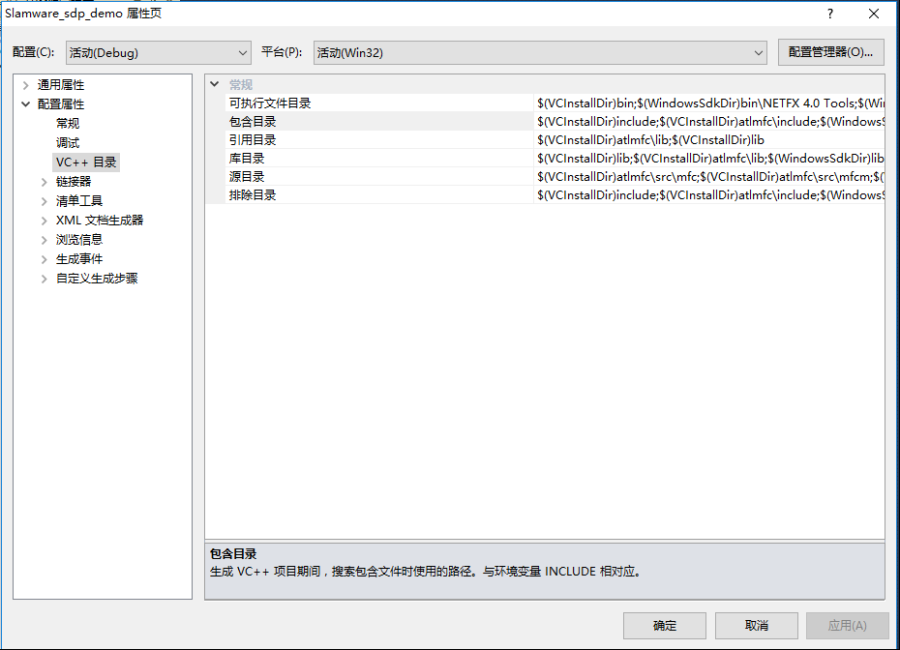
配置编译选项步骤1 打开项目属性面板
在Solution Explorer(解决方案)中右键单击您刚刚创建的项目,并单击Properties(属性)菜单,打开属性面板:
| Anchor |
|---|
| _Toc462933653 |
|---|
| _Toc462933653 |
|---|
|
图表3-4 项目属性页步骤2 配置VC++目录
在左侧列表中,选择VC++ Directories(VC++目录)
| Anchor |
|---|
| _Toc462933654 |
|---|
| _Toc462933654 |
|---|
|
图表3-5 VC++目录...
| Anchor |
|---|
| _Toc462933656 |
|---|
| _Toc462933656 |
|---|
|
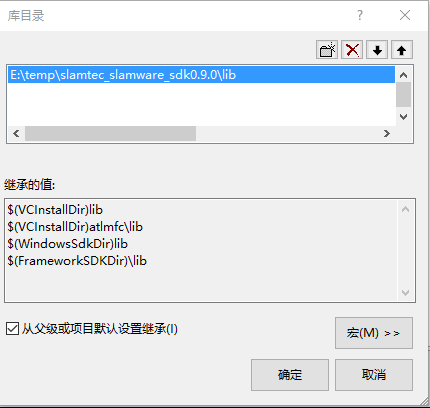
图表3-7 库目录 完成后,您的项目属性页应当与下图相似: 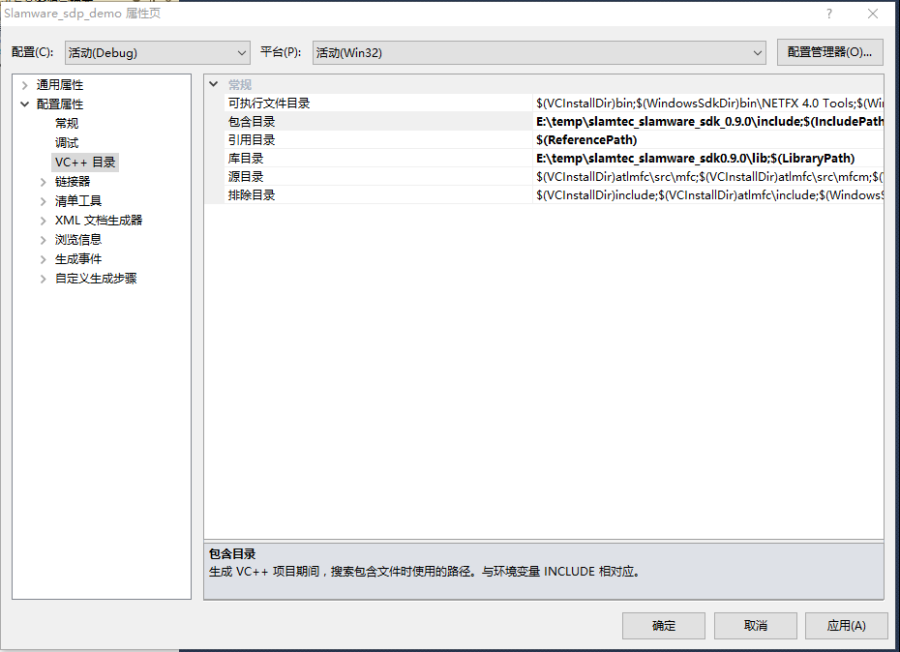
| Anchor |
|---|
| _Toc462933657 |
|---|
| _Toc462933657 |
|---|
|
图表3-8 完成配置的属性页 点击OK(确定)完成配置。| Anchor |
|---|
| _Toc448250536 |
|---|
| _Toc448250536 |
|---|
|
| Anchor |
|---|
| _Toc462933614 |
|---|
| _Toc462933614 |
|---|
|
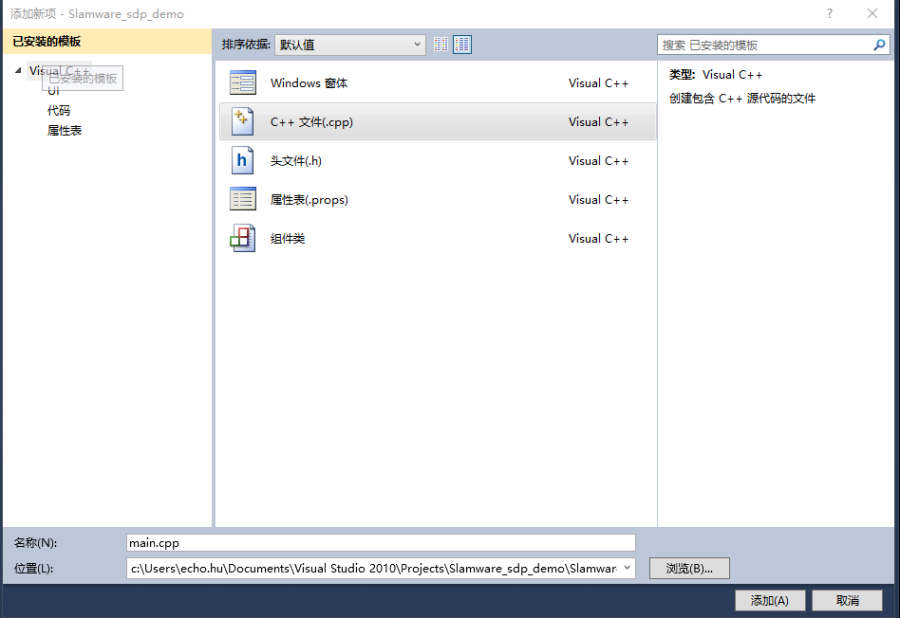
Hello World步骤1 创建源文件
在Solution Explorer中您的项目下的Source Files目录上,右键单机,并在菜单中选择Add(添加)->New Item(新项目)
| Anchor |
|---|
| _Toc462933658 |
|---|
| _Toc462933658 |
|---|
|
图表3-9 新建源文件 选择C++ File (.cpp),并将文件命名成main.cpp步骤2 添加代码
在弹出的编辑器中输入如下代码:
#include <rpos/robot_platforms/slamware_core_platform.h>
#include <iostream>
using namespace std;
using namespace rpos::robot_platforms;
<ac:structured-macro ac:name="unmigrated-wiki-markup" ac:schema-version="1" ac:macro-id="1ccaa2de-9086-41e0-afb7-c694fd3fd295"><ac:plain-text-body><![CDATA[int main(int argc, char* argv[])
]]></ac:plain-text-body></ac:structured-macro>
{
SlamwareCorePlatform platform = SlamwareCorePlatform::connect("192.168.111.1", 1445);
cout << "Base version: " << platform.getSDPVersion() << endl;
return 0;
} |
步骤3 编译运行
在Visual Studio的主菜单中,单击Debug(调试)->Start Debugging(开始调试)即可编译运行您的程序。
| Anchor |
|---|
| _Toc462933615 |
|---|
| _Toc462933615 |
|---|
|
API参考| Anchor |
|---|
| _Toc462933616 |
|---|
| _Toc462933616 |
|---|
|
概览对象 | 说明 |
rpos::core::Location类 | 位置 |
rpos::core::Rotation类 | 旋转姿态 |
rpos::core::Pose类 | 姿态 |
rpos::core::Action类 | 动作 |
rpos::core::ActionStatus枚举 | 动作执行状态 |
rpos::core::Feature类 | 特征类 |
rpos::core::RectangleF类 | 矩形(float型) |
rpos::core::Vector2f类 | 二维向量(float型) |
rpos::core::Vector2i类 | 二维向量(int型) |
rpos::core::LaserPoint类 | 激光雷达扫描点 |
rpos::core::RobotPlatform类 | 机器人平台基类 |
rpos::robot::heading::HeadingMode枚举 | 机器人移动时头朝向的方式 |
rpos::robot::heading::RobotHeading类 | 机器人头朝向某个物体或者方向的设置 |
rpos::robot::option::MoveOption结构体 | 存储机器人运行时的设置。 |
rpos::actions::MoveAction类 | 移动动作 |
rpos::features::ArtifactProvider类 | 器物功能特征,包括了虚拟墙功能。 |
rpos::features::LocationProvider类 | 定位功能特征。 |
rpos::features::MotionPlanner类 | 路径规划功能特征。 |
rpos::features::SweepMotionPlanner类 | 清扫路径规划功能特征类。 |
rpos::features::SystemResource类 | 系统资源功能特征类。 |
rpos::features::location_provider::Map类 | 地图基类。 |
rpos::features::location_provider::MapType枚举 | MapType枚举表示地图的类型。 |
rpos::features::location_provider::BitmapMap类 | 位图地图。 |
rpos::features::location_provider::BitmapMapPixelFormat枚举 | BitmapMapPixelFormat枚举表示位图地图的像素格式。 |
rpos::features::motion_planner::Path类 | 代表一条路径。 |
rpos::features::system_resource::LaserScan类 | 代表一次激光扫描数据。 |
rpos::robot_platforms::SlamwareCorePlatform类 | Slamware CORE对象 |
| Anchor |
|---|
| _Toc462933659 |
|---|
| _Toc462933659 |
|---|
|
图表4-1 API 概览| Anchor |
|---|
| _Toc448250539 |
|---|
| _Toc448250539 |
|---|
|
| Anchor |
|---|
| _Toc462933617 |
|---|
| _Toc462933617 |
|---|
|
rpos::core::Location类概览
Location类用于表示三维空间中的一个坐标,由x,y,z三个成员组成,遵循右手坐标系。
头文件
rpos/core/pose.h
构造器
Location()
Location(double x, double y, double z)
Location(const Location&)
运算符
Location& operator=(const Location&)
方法
double x() const
double& x()
double y() const
double& y()
double z() const
double& z()
| Anchor |
|---|
| _Location()构造器 |
|---|
| _Location()构造器 |
|---|
|
Location()构造器创建一个Location对象,并自动将x、y、z都设为0。
| Anchor |
|---|
| _Location(double_x,_double |
|---|
| _Location(double_x,_double |
|---|
|
Location(double x, double y, double z)构造器创建一个Location对象,将x、y、z设定为相应的值。
| Anchor |
|---|
| _Location(const_Location&) |
|---|
| _Location(const_Location&) |
|---|
|
| Anchor |
|---|
| _Location(const_Location&)构造器 |
|---|
| _Location(const_Location&)构造器 |
|---|
|
Location(const Location&)构造器拷贝构造函数。
| Anchor |
|---|
| _Location&_operator | (const_Location& |
|---|
|
Location& operator=(const Location&)运算符赋值运算符。
| Anchor |
|---|
| _double_x()_const、double& |
|---|
| _double_x()_const、double& |
|---|
|
double x() const、double& x()属性x属性。
示例Location location;
std::cout<<location.x()<<std::endl; // output 0
location.x() = 10;
std::cout<<location.x()<<std::endl; // output 10
| Anchor |
|---|
| _double_y()_const、double& |
|---|
| _double_y()_const、double& |
|---|
|
double y() const、double& y()属性y属性,用法请参见x属性。
| Anchor |
|---|
| _double_z()_const、double& |
|---|
| _double_z()_const、double& |
|---|
|
double z() const、double& z()属性z属性,用法请参见x属性。
| Anchor |
|---|
| _Toc448250540 |
|---|
| _Toc448250540 |
|---|
|
| Anchor |
|---|
| _Toc462933618 |
|---|
| _Toc462933618 |
|---|
|
rpos::core::Rotation类概览
Rotation类用以表示物体在三维坐标系中的旋转姿态。Rotation使用弧度作为角度单位。
头文件
rpos/core/pose.h
构造器
[Rotation()
#_Rotation()构造器][Rotation(double yaw, double pitch, double roll) |
#_Rotation(double_yaw,_double][Rotation(const Rotation&) | #_Rotation(const_Rotation&)构造器]运算符
[Rotation& operator=(const Rotation&) | #_Rotation&_operator=(const_Rotation&]方法
double yaw() const
double& yaw()
double pitch() const
double& pitch()
double roll() const
double& roll() | Anchor |
|---|
| _Rotation()构造器 |
|---|
| _Rotation()构造器 |
|---|
|
Rotation()构造器创建一个Rotation对象,并将yaw,pitch,roll都设定为0。 | Anchor |
|---|
| _Rotation(double_yaw,_double |
|---|
| _Rotation(double_yaw,_double |
|---|
|
Rotation(double yaw, double pitch, double roll)构造器创建一个Rotation对象,并将yaw,pitch,roll都设定为相应值。 | Anchor |
|---|
| _Rotation(const_Rotation&)构造器 |
|---|
| _Rotation(const_Rotation&)构造器 |
|---|
|
Rotation(const Rotation&)构造器拷贝构造函数。 | Anchor |
|---|
| _Rotation&_operator | (const_Rotation& |
|---|
|
Rotation& operator=(const Rotation&)运算符赋值运算符。 | Anchor |
|---|
| _double_yaw()_const、double& |
|---|
| _double_yaw()_const、double& |
|---|
|
double yaw() const、double& yaw()属性摇摆角(单位:弧度),遵循Tait-Bryan angles规则,请参见维基百科内容:
{+}http://en.wikipedia.org/wiki/Euler_angles#Tait.E2.80.93Bryan_angles+
用法请参见Location::x()的示例。 | Anchor |
|---|
| _double_pitch()_const、double& |
|---|
| _double_pitch()_const、double& |
|---|
|
double pitch() const、double& pitch()属性俯仰角。 | Anchor |
|---|
| _double_roll()_const, |
|---|
| _double_roll()_const, |
|---|
|
double roll() const, double& roll()属性翻滚角。 | Anchor |
|---|
| _Toc448250541 |
|---|
| _Toc448250541 |
|---|
|
| Anchor |
|---|
| _Toc462933619 |
|---|
| _Toc462933619 |
|---|
|
rpos::core::Pose类概览Pose包含了Location和Rotation数据,即对象在三维空间中的完整姿态。 头文件rpos/core/pose.h 构造器[Pose() |
#_Pose()构造器][Pose(const Location&, const Rotation&) |
#_Pose(const_Location&,_const][Pose(const Location&) |
#_Pose(const_Location&)构造器][Pose(const Rotation&) |
#_Pose(const_Rotation&)构造器][Pose(const Pose&) | #_Pose(const_Pose&)构造器]运算符
[Pose& operator=(const Pose&) | #_Pose&_operator=(const_Pose&)运算符]方法
const Location& location() const
Location& location()
const Rotation& rotation() const
Rotation& rotation()
double x() const
double& x()
double y() const
double& y()
double z() const
double& z()
double yaw() const
double& yaw()
double pitch() const
double& pitch()
double roll() const
[double& roll() | #_double_roll()_const,_1]Pose()构造器
构造一个x、y、z、yaw、pitch、roll都为0的Pose对象。 | Anchor |
|---|
| _Pose(const_Location&,_const |
|---|
| _Pose(const_Location&,_const |
|---|
|
Pose(const Location&, const Rotation&)构造器构造一个location和rotation为对应值的Pose对象。 | Anchor |
|---|
| _Pose(const_Location&)构造器 |
|---|
| _Pose(const_Location&)构造器 |
|---|
|
Pose(const Location&)构造器构造一个location为对应值,yaw、pitch、roll皆为0的Pose对象。 | Anchor |
|---|
| _Pose(const_Rotation&)构造器 |
|---|
| _Pose(const_Rotation&)构造器 |
|---|
|
Pose(const Rotation&)构造器构造一个rotation为对应值,x、y、z皆为0的Pose对象。 | Anchor |
|---|
| _Pose(const_Pose&)构造器 |
|---|
| _Pose(const_Pose&)构造器 |
|---|
|
Pose(const Pose&)构造器拷贝构造函数。 | Anchor |
|---|
| _Pose&_operator | (const_Pose&)运算符 |
|---|
|
Pose& operator=(const Pose&)运算符赋值运算符。 | Anchor |
|---|
| _const_Location&_location() |
|---|
| _const_Location&_location() |
|---|
|
const Location& location() const、Location& location()属性位置,详见Location类。 | Anchor |
|---|
| _const_Rotation&_rotation() |
|---|
| _const_Rotation&_rotation() |
|---|
|
const Rotation& rotation() const、Rotation& rotation()属性旋转,详见Rotation类。 | Anchor |
|---|
| _double_x()_const、double&_1 |
|---|
| _double_x()_const、double&_1 |
|---|
|
double x() const、double& x()属性x属性。 示例Location location;
std::cout<<location.x()<<std::endl; // output 0
location.x() = 10;
std::cout<<location.x()<<std::endl; // output 10 | Anchor |
|---|
| _double_y()_const、double&_1 |
|---|
| _double_y()_const、double&_1 |
|---|
|
double y() const、double& y()属性y属性,用法请参见x属性。 | Anchor |
|---|
| _double_z()_const、double&_1 |
|---|
| _double_z()_const、double&_1 |
|---|
|
double z() const、double& z()属性z属性,用法请参见x属性。 | Anchor |
|---|
| _double_yaw()_const、double&_1 |
|---|
| _double_yaw()_const、double&_1 |
|---|
|
double yaw() const、double& yaw()属性摇摆角(单位:弧度),遵循Tait-Bryan angles规则,请参见维基百科内容:
{+}http://en.wikipedia.org/wiki/Euler_angles#Tait.E2.80.93Bryan_angles+
用法请参见Location::x()的示例。 | Anchor |
|---|
| _double_pitch()_const、double&_1 |
|---|
| _double_pitch()_const、double&_1 |
|---|
|
double pitch() const、double& pitch()属性俯仰角。 | Anchor |
|---|
| _double_roll()_const,_1 |
|---|
| _double_roll()_const,_1 |
|---|
|
double roll() const, double& roll()属性翻滚角。 | Anchor |
|---|
| _rpos::core::Action类 |
|---|
| _rpos::core::Action类 |
|---|
|
| Anchor |
|---|
| _Toc448250542 |
|---|
| _Toc448250542 |
|---|
|
| Anchor |
|---|
| _Toc462933620 |
|---|
| _Toc462933620 |
|---|
|
rpos::core::Action类概览Action类表示一个动作。 头文件rpos/core/action.h 构造器Action(const Action&) 运算符Action& operator=(const Action&) 方法ActionStatus getStatus()
void cancel()
ActionStatus waitUntilDone()
template<class ActionT> ActionT cast() | Anchor |
|---|
| _rpos::core::ActionStatus枚举 |
|---|
| _rpos::core::ActionStatus枚举 |
|---|
|
| Anchor |
|---|
| _Action(const_Action&)构造器 |
|---|
| _Action(const_Action&)构造器 |
|---|
|
Action(const Action&)构造器拷贝构造函数。 | Anchor |
|---|
| _Action&_operator | (const_Action&) |
|---|
|
Action& operator=(const Action&)运算符赋值运算符。 | Anchor |
|---|
| _ActionStatus_getStatus() |
|---|
| _ActionStatus_getStatus() |
|---|
|
ActionStatus getStatus()获得当前动作状态,返回值详见ActionStatus枚举。 | Anchor |
|---|
| _void_cancel() |
|---|
| _void_cancel() |
|---|
|
void cancel()取消当前动作。 | Anchor |
|---|
| _ActionStatus_waitUntilDone() |
|---|
| _ActionStatus_waitUntilDone() |
|---|
|
ActionStatus waitUntilDone()等待动作完成或出错,返回值为动作结束时的动作状态,详见ActionStatus枚举。 | Anchor |
|---|
| _template<class_ActionT>_ActionT |
|---|
| _template<class_ActionT>_ActionT |
|---|
|
template<class ActionT> ActionT cast()将rpos::core::Action的对象转换成子类的对象 示例rpos::core::Action someAction = robotPlatform.startSomeAction();
rpos::actions::MoveAction moveAction = someAction.cast<rpos::actions::MoveAction>; | Anchor |
|---|
| _Toc448250543 |
|---|
| _Toc448250543 |
|---|
|
| Anchor |
|---|
| _Toc462933621 |
|---|
| _Toc462933621 |
|---|
|
rpos::core::ActionStatus枚举概览ActionStatus枚举表示动作的状态。 头文件rpos/core/action.h 枚举项ActionStatusWaitingForStart
ActionStatusRunning
ActionStatusFinished
ActionStatusPaused
ActionStatusStopped
ActionStatusError | Anchor |
|---|
| _ActionStatusWaitingForStart |
|---|
| _ActionStatusWaitingForStart |
|---|
|
ActionStatusWaitingForStart动作正在等待开始 | Anchor |
|---|
| _ActionStatusRunning |
|---|
| _ActionStatusRunning |
|---|
|
ActionStatusRunning动作正在进行 | Anchor |
|---|
| _ActionStatusFinished |
|---|
| _ActionStatusFinished |
|---|
|
ActionStatusFinished动作已经完成 | Anchor |
|---|
| _ActionStatusPaused |
|---|
| _ActionStatusPaused |
|---|
|
ActionStatusPaused动作已经暂停 | Anchor |
|---|
| _ActionStatusStopped |
|---|
| _ActionStatusStopped |
|---|
|
ActionStatusStopped动作已经停止(取消) | Anchor |
|---|
| _ActionStatusError |
|---|
| _ActionStatusError |
|---|
|
ActionStatusError动作执行过程中出现错误 | Anchor |
|---|
| _rpos::core::Feature类 |
|---|
| _rpos::core::Feature类 |
|---|
|
| Anchor |
|---|
| _Toc448250544 |
|---|
| _Toc448250544 |
|---|
|
| Anchor |
|---|
| _Toc462933622 |
|---|
| _Toc462933622 |
|---|
|
rpos::core::Feature类概览Feature类表示一个特征,即一个特定的功能集合。 头文件rpos/core/feature.h 构造器Feature(const Feature&) 运算符Feature& operator=(const Feature&) | Anchor |
|---|
| _Feature(const_Feature&)构造器 |
|---|
| _Feature(const_Feature&)构造器 |
|---|
|
Feature(const Feature&)构造器拷贝构造函数 | Anchor |
|---|
| _Feature&_operator | (const_Feature&) |
|---|
|
Feature& operator=(const Feature&)运算符赋值运算符 | Anchor |
|---|
| _Toc448250545 |
|---|
| _Toc448250545 |
|---|
|
| Anchor |
|---|
| _Toc462933623 |
|---|
| _Toc462933623 |
|---|
|
rpos::core::RectangleF类概览RectangleF类表示一个矩形,其坐标参数的类型为float。 头文件rpos/core/geometory.h 构造器RectangleF()
RectangleF(Vector2f position, Vector2f size)
RectangleF(float x, float y, float width, float height)
RectangleF(const RectangleF&) 运算符RectangleF& operator=(const RectangleF&) 方法[const Vector2f& position()
Vector2f& position() | #_const_Vector2f&_position()、Vector2f]
[const Vector2f& size()
Vector2f& size() | #_const_Vector2f&_size()、Vector2f&]
[float x() const
float& x() | #_float_x()_const、float&]
[float y() const
float& y() | #_float_y()_const、float&]
[float width() const
float& width() | #_float_width()_const、float&]
[float height() const
float& height() | #_float_height()_const、float&]
float left() const
float right() const
float top() const
float bottom() const
bool contains(const Vector2i& point)
bool empty()
bool contains(const RectangleF& dest)
void unionOf(const RectangleF& dest) | Anchor |
|---|
| _RectangleF()构造器 |
|---|
| _RectangleF()构造器 |
|---|
|
RectangleF()构造器创建一个x、y、width、height都为0的矩形。 | Anchor |
|---|
| _RectangleF(Vector2f_position,_Vecto |
|---|
| _RectangleF(Vector2f_position,_Vecto |
|---|
|
RectangleF(Vector2f position, Vector2f size)构造器创建一个位置和大小为指定值的矩形。 | Anchor |
|---|
| _RectangleF(float_x,_float |
|---|
| _RectangleF(float_x,_float |
|---|
|
RectangleF(float x, float y, float width, float height)构造器创建一个位置和大小为指定值的矩形。 | Anchor |
|---|
| _RectangleF(const_RectangleF&) |
|---|
| _RectangleF(const_RectangleF&) |
|---|
|
RectangleF(const RectangleF&)构造器拷贝构造函数 | Anchor |
|---|
| _RectangleF&_operator | (const_Rectang |
|---|
|
RectangleF& operator=(const RectangleF&)运算符赋值运算符 | Anchor |
|---|
| _const_Vector2f&_position()、Vector2f |
|---|
| _const_Vector2f&_position()、Vector2f |
|---|
|
const Vector2f& position()、Vector2f& position()属性矩形的位置(左上角) | Anchor |
|---|
| _const_Vector2f&_size()、Vector2f& |
|---|
| _const_Vector2f&_size()、Vector2f& |
|---|
|
const Vector2f& size()、Vector2f& size()属性矩形的大小 | Anchor |
|---|
| _float_x()_const、float& |
|---|
| _float_x()_const、float& |
|---|
|
float x() const、float& x()属性矩形左上角的x坐标 | Anchor |
|---|
| _float_y()_const、float& |
|---|
| _float_y()_const、float& |
|---|
|
float y() const、float& y()属性矩形左上角的y坐标 | Anchor |
|---|
| _float_width()_const、float& |
|---|
| _float_width()_const、float& |
|---|
|
float width() const、float& width()属性矩形的宽度 | Anchor |
|---|
| _float_height()_const、float& |
|---|
| _float_height()_const、float& |
|---|
|
float height() const、float& height()属性矩形的高度 | Anchor |
|---|
| _float_left()_const属性 |
|---|
| _float_left()_const属性 |
|---|
|
float left() const属性矩形左侧的x坐标 | Anchor |
|---|
| _float_right()_const属性 |
|---|
| _float_right()_const属性 |
|---|
|
float right() const属性矩形右侧的x坐标(right=x+width) | Anchor |
|---|
| _float_top()_const属性 |
|---|
| _float_top()_const属性 |
|---|
|
float top() const属性矩形顶部的y坐标 | Anchor |
|---|
| _float_bottom()_const属性 |
|---|
| _float_bottom()_const属性 |
|---|
|
float bottom() const属性矩形底部的y坐标(bottom=y+height) | Anchor |
|---|
| _bool_contains(const_Vector2i& |
|---|
| _bool_contains(const_Vector2i& |
|---|
|
bool contains(const Vector2i& point)判断点是否在矩形的范围内 | Anchor |
|---|
| _bool_empty() |
|---|
| _bool_empty() |
|---|
|
bool empty()判断矩形是否是全空的(即width() < epsilon或height()<epsilon) | Anchor |
|---|
| _bool_contains(const_RectangleF& |
|---|
| _bool_contains(const_RectangleF& |
|---|
|
bool contains(const RectangleF& dest)判断目标矩形是否完全在本矩形的区域内 | Anchor |
|---|
| _void_unionOf(const_RectangleF& |
|---|
| _void_unionOf(const_RectangleF& |
|---|
|
void unionOf(const RectangleF& dest)计算本矩形和目标矩形重合的部分,并将本矩形设定为该重合部分矩形。 | Anchor |
|---|
| _Toc448250546 |
|---|
| _Toc448250546 |
|---|
|
| Anchor |
|---|
| _Toc462933624 |
|---|
| _Toc462933624 |
|---|
|
rpos::core::Vector2f类概览二维向量,元素数据类型为float型。 头文件rpos/core/geometry.h 构造器Vector2f()
Vector2f(float x, float y)
Vector2f(const Vector2f&) 运算符Vector2f& operator=(const Vector2f&) 方法[float x() const
float& x() | #_float_x()_const、float&_1]
[float y() const
float& y() | #_float_y()_const、float&_1] | Anchor |
|---|
| _Vector2f()构造器 |
|---|
| _Vector2f()构造器 |
|---|
|
Vector2f()构造器构造一个新的向量,其x、y的值是不确定的。 | Anchor |
|---|
| _Vector2f(float_x,_float |
|---|
| _Vector2f(float_x,_float |
|---|
|
Vector2f(float x, float y)构造器构造一个x、y为指定的值的向量。 | Anchor |
|---|
| _Vector2f(const_Vector2f&) |
|---|
| _Vector2f(const_Vector2f&) |
|---|
|
Vector2f(const Vector2f&)构造器拷贝构造函数。 | Anchor |
|---|
| _Vector2f&_operator | (const_Vector2f& |
|---|
|
Vector2f& operator=(const Vector2f&)运算符赋值运算符。 | Anchor |
|---|
| _float_x()_const、float&_1 |
|---|
| _float_x()_const、float&_1 |
|---|
|
float x() const、float& x()属性二维向量的x分量。 | Anchor |
|---|
| _float_y()_const、float&_1 |
|---|
| _float_y()_const、float&_1 |
|---|
|
float y() const、float& y()属性二维向量的y分量。 | Anchor |
|---|
| _Toc448250547 |
|---|
| _Toc448250547 |
|---|
|
| Anchor |
|---|
| _Toc462933625 |
|---|
| _Toc462933625 |
|---|
|
rpos::core::Vector2i类概览二维向量,元素数据类型为int型。 头文件rpos/core/geometry.h 构造器Vector2i()
Vector2i(float x, float y)
Vector2i(const Vector2i&) 运算符Vector2i& operator=(const Vector2i&) 方法int x() const
int& x()
int y() const
int& y()
与rpos::core::Vector2f类类似,不再赘述。 | Anchor |
|---|
| _Toc448250548 |
|---|
| _Toc448250548 |
|---|
|
| Anchor |
|---|
| _Toc462933626 |
|---|
| _Toc462933626 |
|---|
|
rpos::core::LaserPoint类概览激光雷达测距的单点数据,包括了距离、角度、是否有效等信息。 头文件rpos/core/laser_point.h 构造器LaserPoint()
LaserPoint(float distance, float angle, bool valid)
LaserPoint(const LaserPoint&) 运算符LaserPoint& operator=(const LaserPoint&) 方法[float distance() const
float& distance() | #_float_distance()_const、float&]
[float angle() const
float& angle() | #_float_angle()_const、float&]
[bool valid() const
bool& valid() | #_bool_valid()_const、bool&] | Anchor |
|---|
| _LaserPoint()构造器 |
|---|
| _LaserPoint()构造器 |
|---|
|
LaserPoint()构造器创建一个新的LaserPoint对象。 | Anchor |
|---|
| _LaserPoint(float_distance,_float |
|---|
| _LaserPoint(float_distance,_float |
|---|
|
LaserPoint(float distance, float angle, bool valid)构造器创建一个距离、角度、有效性为指定值的LaserPoint对象。 | Anchor |
|---|
| _LaserPoint(const_LaserPoint&)构造器 |
|---|
| _LaserPoint(const_LaserPoint&)构造器 |
|---|
|
LaserPoint(const LaserPoint&)构造器拷贝构造函数 | Anchor |
|---|
| _LaserPoint&_operator | (const_LaserPo |
|---|
|
LaserPoint& operator=(const LaserPoint&)运算符赋值运算符 | Anchor |
|---|
| _float_distance()_const、float& |
|---|
| _float_distance()_const、float& |
|---|
|
float distance() const、float& distance()属性距离数据(单位:米) | Anchor |
|---|
| _float_angle()_const、float& |
|---|
| _float_angle()_const、float& |
|---|
|
float angle() const、float& angle()属性本次测量的角度(单位:弧度) | Anchor |
|---|
| _bool_valid()_const、bool& |
|---|
| _bool_valid()_const、bool& |
|---|
|
bool valid() const、bool& valid()属性本次测量是否有效 | Anchor |
|---|
| _rpos::core::RobotPlatform类 |
|---|
| _rpos::core::RobotPlatform类 |
|---|
|
| Anchor |
|---|
| _Toc448250549 |
|---|
| _Toc448250549 |
|---|
|
| Anchor |
|---|
| _Toc462933627 |
|---|
| _Toc462933627 |
|---|
|
rpos::core::RobotPlatform类概览机器人平台是一系列设备组合而成的整体,提供一系列的特征从而提供功能。RobotPlatform类是所有机器人平台的基类。 头文件rpos/core/robot_platform.h 构造器RobotPlatform(const RobotPlatform&) 运算符RobotPlatform& operator=(const RobotPlatform&) 方法std::vector<Feature> getFeatures()
template<class RobotPlatformT> RobotPlatformT cast() | Anchor |
|---|
| _RobotPlatform(const_RobotPlatform&) |
|---|
| _RobotPlatform(const_RobotPlatform&) |
|---|
|
RobotPlatform(const RobotPlatform&)构造器拷贝构造函数。 | Anchor |
|---|
| _RobotPlatform&_operator | (const_Robo |
|---|
|
RobotPlatform& operator=(const RobotPlatform&)运算符赋值运算符。 | Anchor |
|---|
| _std::vector<Feature>_getFeatures() |
|---|
| _std::vector<Feature>_getFeatures() |
|---|
|
std::vector<Feature> getFeatures()获得该机器人平台提供的所有特征。 | Anchor |
|---|
| _template<class_RobotPlatformT>_Robo |
|---|
| _template<class_RobotPlatformT>_Robo |
|---|
|
template<class RobotPlatformT> RobotPlatformT cast()将RobotPlatform对象转换成子类对象,示例请参考rpos::core::Action::cast<>。 | Anchor |
|---|
| _rpos::robot::heading::HeadingMode枚举 |
|---|
| _rpos::robot::heading::HeadingMode枚举 |
|---|
|
| Anchor |
|---|
| _Toc462933628 |
|---|
| _Toc462933628 |
|---|
|
rpos::robot::heading::HeadingMode枚举概览HeadingMode枚举表示机器人移动时头朝向的方式 头文件rpos/features/motion_planner/move_heading.h 枚举项HeadingModeAuto,
HeadingModeFixAngle,
HeadingModeCircleMotion,
HeadingModeDirection | Anchor |
|---|
| _HeadingModeAuto |
|---|
| _HeadingModeAuto |
|---|
|
HeadingModeAuto机器人按照自己的方式随意行走。 | Anchor |
|---|
| _HeadingModeFixAngle |
|---|
| _HeadingModeFixAngle |
|---|
|
HeadingModeFixAngle机器人行走时头与前进方向成固定角度。 | Anchor |
|---|
| _HeadingModeCircleMotion |
|---|
| _HeadingModeCircleMotion |
|---|
|
HeadingModeCircleMotion机器人行走时头始终朝向某个物体或者某点。 | Anchor |
|---|
| _HeadingModeDirection |
|---|
| _HeadingModeDirection |
|---|
|
HeadingModeDirection机器人行走时头始终朝向某个固定的方向。 | Anchor |
|---|
| _Toc462933629 |
|---|
| _Toc462933629 |
|---|
|
rpos::robot::heading::RobotHeading类概览RobotHeading类表示机器人在行走的时候的头朝向某个物体或者方向的设置 头文件rpos/features/motion_planner/move_heading.h 构造器RobotHeading()
RobotHeading(HeadingMode headingMode, rpos::core::Pose pose) 运算符[RobotHeading& operator=(const RobotHeading&) | #_RobotHeading&_operator=(const_Robot]方法
const rpos::core::Pose& pose() const
const HeadingMode& headingMode() const | Anchor |
|---|
| _RobotHeading()构造器 |
|---|
| _RobotHeading()构造器 |
|---|
|
RobotHeading()构造器构造函数。 | Anchor |
|---|
| _RobotHeading(HeadingMode_headingMod |
|---|
| _RobotHeading(HeadingMode_headingMod |
|---|
|
RobotHeading(HeadingMode headingMode, rpos::core::Pose pose)构造器构造函数。 | Anchor |
|---|
| _RobotHeading&_operator | (const_Robot |
|---|
|
RobotHeading& operator=(const RobotHeading&)运算符赋值运算符。 | Anchor |
|---|
| _const_rpos::core::Pose&_RobotHeadin |
|---|
| _const_rpos::core::Pose&_RobotHeadin |
|---|
|
const rpos::core::Pose& RobotHeading::pose() const获取机器人行走时头朝向的角度或者物体的位置
头朝向与位置或者角度的对应关系。 |
朝向 | 值 |
HeadingModeAuto | Pose值不可用 |
HeadingModeFixAngle或者HeadingModeDirection | Pose的Rotation参数可用 |
HeadingModeCircleMotion | Pose的Location参数可用 |
| Anchor |
|---|
| _const_HeadingMode&_RobotHeading::he |
|---|
| _const_HeadingMode&_RobotHeading::he |
|---|
|
const HeadingMode& RobotHeading::headingMode() const获取机器人行走时头朝向设置。
可以参考rpos::robot::heading::HeadingMode。
| Anchor |
|---|
| _Toc462933630 |
|---|
| _Toc462933630 |
|---|
|
rpos::robot::option::MoveOption结构体概览
MoveOption结构体存储机器人运行时的设置。
头文件
rpos/features/motion_planner/move_option.h
结构体说明
appending
isMilestone
robotHeading
appending如果机器人正在执行其他的移动动作,该参数决定新的点是追加或是替换既有节点。
isMilestone机器人是否通过路径搜索的方式前往目的地。
| Anchor |
|---|
| _robotHeading |
|---|
| _robotHeading |
|---|
|
robotHeading机器人行走时头朝向设置。
参考rpos::robot::heading::RobotHeading。
| Anchor |
|---|
| _Toc448250550 |
|---|
| _Toc448250550 |
|---|
|
| Anchor |
|---|
| _Toc462933631 |
|---|
| _Toc462933631 |
|---|
|
rpos::actions::MoveAction类概览
MoveAction类表示一个移动的动作,它包含了当前机器人规划的路径、检查点列表、移动的进程。
头文件
rpos/features/motion_planner/move_action.h
父类
继承自rpos::core::Action类
构造器
MoveAction(boost::shared_ptr<rpos::actions::detail::MoveActionImpl>)
MoveAction(const MoveAction&)
运算符
MoveAction& operator=(const MoveAction&)
方法
rpos::features::motion_planner::Path getRemainingPath()
rpos::features::motion_planner::Path getRemainingMilestones()
继承自rpos::core::Action类的方法
ActionStatus getStatus()
void cancel()
ActionStatus waitUntilDone()
template<class ActionT> ActionT cast()
| Anchor |
|---|
| _MoveAction(boost::shared_ptr<rpos:: |
|---|
| _MoveAction(boost::shared_ptr<rpos:: |
|---|
|
MoveAction(boost::shared_ptr<rpos::actions::detail::MoveActionImpl>)构造器该构造器仅限SDK内部使用。
| Anchor |
|---|
| _MoveAction(const_MoveAction&)构造器 |
|---|
| _MoveAction(const_MoveAction&)构造器 |
|---|
|
MoveAction(const MoveAction&)构造器拷贝构造函数。
| Anchor |
|---|
| _MoveAction&_operator | (const_MoveAct |
|---|
|
MoveAction& operator=(const MoveAction&)运算符赋值运算符。
| Anchor |
|---|
| _rpos::features::motion_planner::Pat_1 |
|---|
| _rpos::features::motion_planner::Pat_1 |
|---|
|
rpos::features::motion_planner::Path getRemainingPath()获得已经规划好的,剩余的路径。
| Anchor |
|---|
| _rpos::features::motion_planner::Pat_2 |
|---|
| _rpos::features::motion_planner::Pat_2 |
|---|
|
rpos::features::motion_planner::Path getRemainingMilestones()获得剩余的里程碑。
| Anchor |
|---|
| _Toc448250551 |
|---|
| _Toc448250551 |
|---|
|
| Anchor |
|---|
| _Toc462933632 |
|---|
| _Toc462933632 |
|---|
|
rpos::features::ArtifactProvider类概览
器物功能特征,包括了虚拟墙功能。
头文件
rpos/features/artifact_provider.h
父类
继承自rpos::core::Feature类
构造器
ArtifactProvider(boost::shared_ptr<detail::ArtifactProviderImpl>)
ArtifactProvider(const ArtifactProvider&)
运算符
ArtifactProvider& operator=(const ArtifactProvider&)
方法
[std::vector<rpos::core::Line> getWalls()
#_std::vector<rpos::core::Line>_getWa][bool addWall(const rpos::core::Line&) |
#_bool_addWall(const_rpos::core::Line][bool addWalls(const std::vector<rpos::core::Line>&) |
#_bool_addWalls(const_std::vector<rpo][bool clearWallById(const rpos::core::SegmentID&) |
#_bool_clearWallById(const_rpos::core][bool clearWalls() | Anchor |
|---|
| _ArtifactProvider(boost::shared_ptr< |
|---|
| _ArtifactProvider(boost::shared_ptr< |
|---|
|
| #_bool_clearWalls()]ArtifactProvider(boost::shared_ptr<detail::ArtifactProviderImpl>)构造器
该构造器仅限SDK内部使用。 | Anchor |
|---|
| _ArtifactProvider(const_ArtifactProv |
|---|
| _ArtifactProvider(const_ArtifactProv |
|---|
|
ArtifactProvider(const ArtifactProvider&)构造器拷贝构造函数。 | Anchor |
|---|
| _ArtifactProvider&_operator | (const_A |
|---|
|
ArtifactProvider& operator=(const ArtifactProvider&)运算符赋值运算符。 | Anchor |
|---|
| _std::vector<rpos::core::Line>_getWa |
|---|
| _std::vector<rpos::core::Line>_getWa |
|---|
|
std::vector<rpos::core::Line> getWalls()获取系统中所有的虚拟墙。 | Anchor |
|---|
| _bool_addWall(const_rpos::core::Line |
|---|
| _bool_addWall(const_rpos::core::Line |
|---|
|
bool addWall(const rpos::core::Line&)添加虚拟墙。 | Anchor |
|---|
| _bool_addWalls(const_std::vector<rpo |
|---|
| _bool_addWalls(const_std::vector<rpo |
|---|
|
bool addWalls(const std::vector<rpos::core::Line>&)添加虚拟墙。 | Anchor |
|---|
| _bool_clearWallById(const_rpos::core |
|---|
| _bool_clearWallById(const_rpos::core |
|---|
|
bool clearWallById(const rpos::core::SegmentID&)清除指定的虚拟墙。 | Anchor |
|---|
| _bool_clearWalls() |
|---|
| _bool_clearWalls() |
|---|
|
bool clearWalls()清除所有的虚拟墙。 | Anchor |
|---|
| _Toc448250552 |
|---|
| _Toc448250552 |
|---|
|
| Anchor |
|---|
| _Toc462933633 |
|---|
| _Toc462933633 |
|---|
|
rpos::features::LocationProvider类概览定位功能特征,包括了自动建图和定位的功能(亦即SLAM功能)。 头文件rpos/features/location_provider.h 父类继承自rpos::core::Feature类 构造器LocationProvider(boost::shared_ptr<detail::LocationProviderImpl>)
LocationProvider(const LocationProvider&) 运算符LocationProvider& operator=(const LocationProvider&) 方法std::vector<rpos::features::location_provider::MapType> getAvailableMaps()
[rpos::features::location_provider::Map getMap(
rpos::features::location_provider::MapType,
rpos::core::RectangleF,
rpos::features::location_provider::MapKind) | #_location_provider::Map_getMap(locat]
[bool setMap(
const rpos::features::location_provider::Map&,
rpos::features::location_provider::MapType,
rpos::features::location_provider::MapKind) | #_bool_setMap(_const_1]
[rpos::core::RectangleF getKnownArea(
rpos::features::location_provider::MapType,
rpos::features::location_provider::MapKind) | #_core::RectangleF_getKnownArea(locat]
[bool clearMap() |
#_bool_clearMap()_1][rpos::core::Location getLocation() |
#_core::Location_getLocation()][rpos::core::Pose getPose() |
#_rpos::core::Pose_getPose()][bool setPose(const rpos::core::Pose&) |
#_bool_setPose(const_rpos::core::Pose][bool getMapLocalization() |
#_bool_getMapLocalization()_2][bool setMapLocalization(bool) |
#_bool_setMapLocalization(bool)_2][bool getMapUpdate() |
#_bool_getMapUpdate()_2][bool setMapUpdate(bool) | Anchor |
|---|
| _LocationProvider(boost::shared_ptr< |
|---|
| _LocationProvider(boost::shared_ptr< |
|---|
|
| #_bool_setMapUpdate(bool)_2]LocationProvider(boost::shared_ptr<detail::LocationProviderImpl>)构造器
该构造器仅限SDK内部使用。 | Anchor |
|---|
| _LocationProvider(const_LocationProv |
|---|
| _LocationProvider(const_LocationProv |
|---|
|
LocationProvider(const LocationProvider&)构造器拷贝构造函数。 | Anchor |
|---|
| _LocationProvider&_operator | (const_L |
|---|
|
LocationProvider& operator=(const LocationProvider&)运算符赋值运算符。 | Anchor |
|---|
| _std::vector<location_provider::MapT |
|---|
| _std::vector<location_provider::MapT |
|---|
|
std::vector< rpos::features::location_provider::MapType> getAvailableMaps()获得该定位功能特征提供的所有地图类型。 | Anchor |
|---|
| _location_provider::Map_getMap(locat |
|---|
| _location_provider::Map_getMap(locat |
|---|
|
rpos::features::location_provider::Map getMap(rpos::features::location_provider::MapType, rpos::core::RectangleF, rpos::features::location_provider::MapKind)获得该定位功能特征提供的指定地图类型指定区域的地图数据。 | Anchor |
|---|
| _bool_setMap(_const_1 |
|---|
| _bool_setMap(_const_1 |
|---|
|
bool setMap(const rpos::features::location_provider::Map&,rpos::features::location_provider::MapType,rpos::features::location_provider::MapKind)上载指定地图类型指定区域的地图数据到该定位功能特征,返回是否成功。 | Anchor |
|---|
| _core::RectangleF_getKnownArea(locat |
|---|
| _core::RectangleF_getKnownArea(locat |
|---|
|
rpos::core::RectangleF getKnownArea(rpos::features::location_provider::MapType, rpos::features::location_provider::MapKind)获得指定地图类型的地图中,已经完成建图的区域。 | Anchor |
|---|
| _bool_clearMap()_1 |
|---|
| _bool_clearMap()_1 |
|---|
|
bool clearMap()清除地图数据。 | Anchor |
|---|
| _core::Location_getLocation() |
|---|
| _core::Location_getLocation() |
|---|
|
rpos::core::Location getLocation()获得机器人在上述地图坐标系统中的坐标。 | Anchor |
|---|
| _core::Pose_getPose() |
|---|
| _core::Pose_getPose() |
|---|
|
| Anchor |
|---|
| _rpos::core::Pose_getPose() |
|---|
| _rpos::core::Pose_getPose() |
|---|
|
rpos::core::Pose getPose()获得机器人在上述地图坐标系统中的姿态。 | Anchor |
|---|
| _bool_setPose(const_rpos::core::Pose |
|---|
| _bool_setPose(const_rpos::core::Pose |
|---|
|
bool setPose(const rpos::core::Pose&)上载当前机器人的姿态到上述地图坐标系统中,返回是否成功。 | Anchor |
|---|
| _bool_getMapLocalization()_2 |
|---|
| _bool_getMapLocalization()_2 |
|---|
|
bool getMapLocalization()获得机器人是否启用定位功能。 | Anchor |
|---|
| _bool_setMapLocalization(bool)_2 |
|---|
| _bool_setMapLocalization(bool)_2 |
|---|
|
bool setMapLocalization(bool)设置机器人是否启用定位功能。 | Anchor |
|---|
| _bool_getMapUpdate()_2 |
|---|
| _bool_getMapUpdate()_2 |
|---|
|
bool getMapUpdate()获取机器人是否启用地图更新功能。 | Anchor |
|---|
| _bool_setMapUpdate(bool)_2 |
|---|
| _bool_setMapUpdate(bool)_2 |
|---|
|
bool setMapUpdate(bool)设置机器人是否启用地图更新功能。 | Anchor |
|---|
| _Toc448250553 |
|---|
| _Toc448250553 |
|---|
|
| Anchor |
|---|
| _Toc462933634 |
|---|
| _Toc462933634 |
|---|
|
rpos::features::MotionPlanner类概览路径规划功能特征,包括了动态路径规划功能和自动壁障功能。 头文件rpos/features/motion_planner.h 父类继承自rpos::core::Feature类 构造器MotionPlanner(boost::shared_ptr<detail::MotionPlannerImpl>)
MotionPlanner(const MotionPlanner&) 运算符MotionPlanner& operator=(const MotionPlanner&) 方法[rpos::actions::MoveAction moveTo(
const std::vector<rpos::core::Location>&,
bool, bool) |
#_rpos::actions::MoveAction_moveTo(_c_1][rpos::actions::MoveAction moveTo(const rpos::core::Location&, bool,bool) |
#_rpos::actions::MoveAction_moveTo(co_1][rpos::actions::MoveAction getCurrentAction() |
#_rpos::actions::MoveAction_getCurren_1][rpos::features::motion_planner::Path searchPath(const rpos::core::Location&) | Anchor |
|---|
| _MotionPlanner(boost::shared_ptr<det |
|---|
| _MotionPlanner(boost::shared_ptr<det |
|---|
|
| #_rpos::features::motion_planner::Pat_3]MotionPlanner(boost::shared_ptr<detail::MotionPlannerImpl>)构造器
该构造器仅限SDK内部使用。 | Anchor |
|---|
| _MotionPlanner(const_MotionPlanner&) |
|---|
| _MotionPlanner(const_MotionPlanner&) |
|---|
|
MotionPlanner(const MotionPlanner&)构造器拷贝构造函数。 | Anchor |
|---|
| _MotionPlanner&_operator | (const_Moti |
|---|
|
MotionPlanner& operator=(const MotionPlanner&)运算符赋值运算符。 | Anchor |
|---|
| _rpos::actions::MoveAction_moveTo(_c_1 |
|---|
| _rpos::actions::MoveAction_moveTo(_c_1 |
|---|
|
rpos::actions::MoveAction moveTo( const std::vector<rpos::core::Location>&, bool, bool)让机器人沿着路径移动(机器人会逐一走过路径中的节点,在节点之间尽量走圆滑的曲线,如果遇到障碍物,机器人会自动避开)。 参数 |
名称 | 类型 | 说明 |
locations | const std::vector
<rpos::core::Location>& | 期望机器人经过的点 |
appending | bool | 如果机器人正在执行其他的移动动作,该参数决定新的点是追加或是替换既有节点 |
isMilestone | bool | 当这个参数为true时,机器人会将上述点视作关键点,通过路径搜索的方式前往目的地;当参数为false时,会被视作普通点,不会启用路径搜索功能。 |
| Anchor |
|---|
| _rpos::actions::MoveAction_moveTo(co_1 |
|---|
| _rpos::actions::MoveAction_moveTo(co_1 |
|---|
|
rpos::actions::MoveAction moveTo(const rpos::core::Location&, bool,bool)让机器人移动到目标位置。
参数
名称 | 类型 | 说明 |
location | const rpos::core::Location& | 期望机器人经过的点 |
appending | bool | 如果机器人正在执行其他的移动动作,该参数决定新的点是追加或是替换既有节点 |
isMilestone | bool | 当这个参数为true时,机器人会将上述点视作关键点,通过路径搜索的方式前往目的地;当参数为false时,会被视作普通点,不会启用路径搜索功能。 |
| Anchor |
|---|
| _rpos::actions::MoveAction_getCurren_1 |
|---|
| _rpos::actions::MoveAction_getCurren_1 |
|---|
|
rpos::actions::MoveAction getCurrentAction()获得机器人当前正在进行的移动动作。
您可以使用Action::isEmpty()方法判断它是否存在。当机器人当前没有正在进行的动作时,它Action::isEmpty()将会返回true。
| Anchor |
|---|
| _rpos::features::motion_planner::Pat_3 |
|---|
| _rpos::features::motion_planner::Pat_3 |
|---|
|
rpos::features::motion_planner::Path searchPath(const rpos::core::Location&)使用机器人内置的寻路算法寻找前往指定目的地的路径。
| Anchor |
|---|
| _Toc448250554 |
|---|
| _Toc448250554 |
|---|
|
| Anchor |
|---|
| _Toc462933635 |
|---|
| _Toc462933635 |
|---|
|
rpos::features::SweepMotionPlanner类概览
清扫路径规划功能特征类。该类中的功能主要针对扫地机专属版本Slamware Core所提供的清扫和自动回充功能。
头文件
rpos/features/sweep_motion_planner.h
父类
继承自rpos::core::Feature类
构造器
SweepMotionPlanner(boost::shared_ptr<detail::SweepMotionPlannerImpl>)
SweepMotionPlanner(const SweepMotionPlanner&)
运算符
SweepMotionPlanner& operator=(const SweepMotionPlanner&)
方法
[rpos::actions::SweepMoveAction startSweep()
#_rpos::actions::SweepMoveAction_star_2][rpos::actions::SweepMoveAction sweepSpot(const rpos::core::Location& location) |
#_rpos::actions::SweepMoveAction_swee_1][rpos::actions::MoveAction goHome() | Anchor |
|---|
| _SweepMotionPlanner(boost::shared_pt |
|---|
| _SweepMotionPlanner(boost::shared_pt |
|---|
|
| #_rpos::actions::MoveAction_goHome()_2]SweepMotionPlanner(boost::shared_ptr<detail::SweepMotionPlannerImpl>)构造器
该构造器仅限SDK内部使用。 | Anchor |
|---|
| _SweepMotionPlanner(const_SweepMotio |
|---|
| _SweepMotionPlanner(const_SweepMotio |
|---|
|
SweepMotionPlanner(const SweepMotionPlanner&)构造器拷贝构造函数。 | Anchor |
|---|
| _SweepMotionPlanner&_operator | (const |
|---|
|
SweepMotionPlanner& operator=(const SweepMotionPlanner&)运算符赋值运算符。 | Anchor |
|---|
| _rpos::actions::SweepMoveAction_star_2 |
|---|
| _rpos::actions::SweepMoveAction_star_2 |
|---|
|
rpos::actions::SweepMoveAction startSweep()让机器人进行清扫。(此接口仅适用于扫地机版本) | Anchor |
|---|
| _rpos::actions::SweepMoveAction_swee_1 |
|---|
| _rpos::actions::SweepMoveAction_swee_1 |
|---|
|
rpos::actions::SweepMoveAction sweepSpot(const rpos::core::Location& location)让机器人定点打扫。(此接口仅适用于扫地机版本) | Anchor |
|---|
| _rpos::actions::MoveAction_goHome()_2 |
|---|
| _rpos::actions::MoveAction_goHome()_2 |
|---|
|
rpos::actions::MoveAction goHome()让机器人回家充电。 | Anchor |
|---|
| _rpos::features::system_resource::De_1 |
|---|
| _rpos::features::system_resource::De_1 |
|---|
|
| Anchor |
|---|
| _Toc462933636 |
|---|
| _Toc462933636 |
|---|
|
rpos::features::system_resource::DeviceInfo类概览获取设备信息。设备信息包括设备ID,制造商,型号,硬件版本,软件版本。 头文件rpos/features/device_info.h 构造器DeviceInfo()
[DeviceInfo(const DeviceInfo&) | #_DeviceInfo(const_DeviceInfo&)]运算符
DeviceInfo& operator=(const DeviceInfo&) 方法[std::string deviceID() const、std::string& deviceID(); |
#_std::string_deviceID()_const、std::s] [int manufacturerID() const、int& manufacturerID(); |
#_int_manufacturerID()_const、int&][std::string manufacturerName() const、std::string& manufacturerName(); |
#_std::string_manufacturerName()_cons][int modelID() const、int& modelID(); |
#_int_modelID()_const、int&]std::string modelName() const、std::string& modelName();
[std::string hardwareVersion() const、std::string& hardwareVersion(); |
#_std::string_hardwareVersion()_const_1][std::string softwareVersion() const、std::string& softwareVersion(); | Anchor |
|---|
| _DeviceInfo() |
|---|
| _DeviceInfo() |
|---|
|
| #_std::string_softwareVersion()_const]DeviceInfo()
构造函数。 | Anchor |
|---|
| _DeviceInfo(const_DeviceInfo&) |
|---|
| _DeviceInfo(const_DeviceInfo&) |
|---|
|
DeviceInfo(const DeviceInfo&)构造一个特定设备信息的函数。 | Anchor |
|---|
| _DeviceInfo&_operator | (const_DeviceI |
|---|
|
DeviceInfo& operator=(const DeviceInfo&)赋值运算符。 | Anchor |
|---|
| _std::string_deviceID()_const、std::s |
|---|
| _std::string_deviceID()_const、std::s |
|---|
|
std::string deviceID() const、std::string& deviceID();deviceID属性。 | Anchor |
|---|
| _std::string_manufacturer()_const、st |
|---|
| _std::string_manufacturer()_const、st |
|---|
|
| Anchor |
|---|
| _std::string_hardwareVersion()_const |
|---|
| _std::string_hardwareVersion()_const |
|---|
|
| Anchor |
|---|
| _int_manufacturerID()_const、int& |
|---|
| _int_manufacturerID()_const、int& |
|---|
|
int manufacturerID() const、int& manufacturerID();manufacturerID属性。 | Anchor |
|---|
| _std::string_manufacturerName()_cons |
|---|
| _std::string_manufacturerName()_cons |
|---|
|
std::string manufacturerName() const、std::string& manufacturerName();manufacturerName属性。 | Anchor |
|---|
| _int_modelID()_const、int& |
|---|
| _int_modelID()_const、int& |
|---|
|
int modelID() const、int& modelID();modelID属性。| Anchor |
|---|
| _std::string_modelName()_const、std:: |
|---|
| _std::string_modelName()_const、std:: |
|---|
|
std::string modelName() const、std::string& modelName();modelName属性。 | Anchor |
|---|
| _std::string_hardwareVersion()_const_1 |
|---|
| _std::string_hardwareVersion()_const_1 |
|---|
|
std::string hardwareVersion() const、std::string& hardwareVersion();硬件版本属性。 | Anchor |
|---|
| _std::string_softwareVersion()_const |
|---|
| _std::string_softwareVersion()_const |
|---|
|
std::string softwareVersion() const、std::string& softwareVersion();软件版本属性。 | Anchor |
|---|
| _Toc448250555 |
|---|
| _Toc448250555 |
|---|
|
| Anchor |
|---|
| _Toc462933637 |
|---|
| _Toc462933637 |
|---|
|
rpos::features::SystemResource类概览系统资源功能特征类。该类提供了对原始激光扫描数据、电源管理系统等相关资源的访问API。 头文件rpos/features/system_resource.h 父类继承自rpos::core::Feature类 构造器SystemResource(boost::shared_ptr<detail::SystemResourceImpl>)
SystemResource(const SystemResource&) 运算符SystemResource& operator=(const SystemResource&) 方法int getBatteryPercentage()
bool getBatteryIsCharging()
bool getDCIsConnected()
int getBoardTemperature()
std::string getSDPVersion()
rpos::features::system_resource::LaserScan getLaserScan()
rpos::features::system_resource::DeviceInfo getDeviceInfo()| Anchor |
|---|
| _SystemResource(boost::shared_ptr<de |
|---|
| _SystemResource(boost::shared_ptr<de |
|---|
|
SystemResource(boost::shared_ptr<detail::SystemResourceImpl>)构造器该构造器仅限SDK内部使用。 | Anchor |
|---|
| _SystemResource(const_SystemResource |
|---|
| _SystemResource(const_SystemResource |
|---|
|
SystemResource(const SystemResource&)构造器拷贝构造函数。 | Anchor |
|---|
| _SystemResource&_operator | (const_Sys |
|---|
|
SystemResource& operator=(const SystemResource&)运算符赋值运算符。 | Anchor |
|---|
| _int_getBatteryPercentage()_1 |
|---|
| _int_getBatteryPercentage()_1 |
|---|
|
int getBatteryPercentage()获得电池电量,返回值的单位是百分比。比如电池剩余为56%,则该返回值为56。 | Anchor |
|---|
| _bool_getBatteryIsCharging()_1 |
|---|
| _bool_getBatteryIsCharging()_1 |
|---|
|
bool getBatteryIsCharging()电池是否处于充电状态。 | Anchor |
|---|
| _bool_getDCIsConnected()_1 |
|---|
| _bool_getDCIsConnected()_1 |
|---|
|
bool getDCIsConnected()外部电源是否连接。 | Anchor |
|---|
| _int_getBoardTemperature()_1 |
|---|
| _int_getBoardTemperature()_1 |
|---|
|
int getBoardTemperature()系统温度。 | Anchor |
|---|
| _std::string_getSDPVersion()_1 |
|---|
| _std::string_getSDPVersion()_1 |
|---|
|
std::string getSDPVersion()底盘的版本号。 | Anchor |
|---|
| _rpos::features::system_resource::La_1 |
|---|
| _rpos::features::system_resource::La_1 |
|---|
|
rpos::features::system_resource::LaserScan getLaserScan()获取原始激光扫描数据。 | Anchor |
|---|
| _rpos::features::location_provider:: |
|---|
| _rpos::features::location_provider:: |
|---|
|
| Anchor |
|---|
| _Toc448250556 |
|---|
| _Toc448250556 |
|---|
|
| Anchor |
|---|
| _Toc462933638 |
|---|
| _Toc462933638 |
|---|
|
rpos::features::location_provider::Map类概览地图基类,泛指定位功能获得的地图。 头文件rpos/features/location_provider.h 构造器Map(boost::shared_ptr<detail::MapImpl>)
Map(const Map&) 运算符Map& operator=(const Map&) 方法rpos::core::RectangleF getMapArea()
rpos::core::Vector2f getMapPosition()
rpos::core::Vector2i getMapDimension()
rpos::core::Vector2f getMapResolution()
rpos::system::types::timestamp_t getMapTimestamp()[
void setMapData(float, float, int, int, float, const std::vector<_u8>&, rpos::system::types::_u64) | #_void_setMapData(float,_float,]
std::vector<_u8>& getMapData()
template<class MapT> MapT cast() | Anchor |
|---|
| _Map(boost::shared_ptr<detail::MapIm |
|---|
| _Map(boost::shared_ptr<detail::MapIm |
|---|
|
Map(boost::shared_ptr<detail::MapImpl>)构造器该构造器仅限SDK内部使用。 | Anchor |
|---|
| _Map(const_Map&)构造器 |
|---|
| _Map(const_Map&)构造器 |
|---|
|
Map(const Map&)构造器拷贝构造函数。 | Anchor |
|---|
| _Map&_operator | (const_Map&) |
|---|
|
Map& operator=(const Map&)运算符赋值运算符。 | Anchor |
|---|
| _core::RectangleF_getMapArea() |
|---|
| _core::RectangleF_getMapArea() |
|---|
|
rpos::core::RectangleF getMapArea()获得这张地图所包含的区域。 | Anchor |
|---|
| _core::Vector2f_getMapPosition() |
|---|
| _core::Vector2f_getMapPosition() |
|---|
|
rpos::core::Vector2f getMapPosition()获得这张地图左上角的坐标。 | Anchor |
|---|
| _core::Vector2i_getMapDimension() |
|---|
| _core::Vector2i_getMapDimension() |
|---|
|
rpos::core::Vector2i getMapDimension()获得地图的尺寸(两个维度的像素个数) | Anchor |
|---|
| _core::Vector2f_getMapResolution() |
|---|
| _core::Vector2f_getMapResolution() |
|---|
|
rpos::core::Vector2f getMapResolution()获得地图的分辨率(在各个维度上,每个像素代表多少米) | Anchor |
|---|
| _rpos::system::types::timestamp_t_ge |
|---|
| _rpos::system::types::timestamp_t_ge |
|---|
|
rpos::system::types::timestamp_t getMapTimestamp()获得地图生成的时间。 | Anchor |
|---|
| _void_setMapData(float,_float, |
|---|
| _void_setMapData(float,_float, |
|---|
|
void setMapData(float, float, int, int, float, const std::vector<_u8>&, rpos::system::types::_u64)设置地图数据。 | Anchor |
|---|
| _std::vector<_u8>&_getMapData() |
|---|
| _std::vector<_u8>&_getMapData() |
|---|
|
std::vector<_u8>& getMapData()获得地图数据。 | Anchor |
|---|
| _template<class_MapT>_MapT |
|---|
| _template<class_MapT>_MapT |
|---|
|
template<class MapT> MapT cast()将地图转换成特定类型的子类对象。 | Anchor |
|---|
| _Toc448250557 |
|---|
| _Toc448250557 |
|---|
|
| Anchor |
|---|
| _Toc462933639 |
|---|
| _Toc462933639 |
|---|
|
rpos::features::location_provider::MapType枚举概览MapType枚举表示地图的类型。 头文件rpos/features/location_provider.h 枚举项MapTypeBitmap8Bit | Anchor |
|---|
| _MapTypeBitmap8Bit |
|---|
| _MapTypeBitmap8Bit |
|---|
|
MapTypeBitmap8Bit每像素8位的位图。 | Anchor |
|---|
| _Toc448250558 |
|---|
| _Toc448250558 |
|---|
|
| Anchor |
|---|
| _Toc462933640 |
|---|
| _Toc462933640 |
|---|
|
rpos::features::location_provider::BitmapMap类概览位图地图。 头文件rpos/features/location_provider.h 父类继承自[rpos::features::location_provider::Map类 | #_rpos::features::location_provider::]构造器
[BitmapMap(boost::shared_ptr<detail::BitmapMapImpl>) |
#_BitmapMap(boost::shared_ptr<detail:_1]BitmapMap(const BitmapMap&) 运算符BitmapMap& operator=(const BitmapMap&) 方法BitmapMapPixelFormat getMapFormat() 继承自rpos::features::location_provider::Map类的方法| Anchor |
|---|
| _BitmapMap(boost::shared_ptr<detail: |
|---|
| _BitmapMap(boost::shared_ptr<detail: |
|---|
|
rpos::core::RectangleF getMapArea()
rpos::core::Vector2f getMapPosition()
rpos::core::Vector2i getMapDimension()
rpos::core::Vector2f getMapResolution()
rpos::system::types::timestamp_t getMapTimestamp()[
void setMapData(float, float, int, int, float, const std::vector<_u8>&, rpos::system::types::_u64) | #_void_setMapData(float,_float,]
std::vector<_u8>& getMapData()
template<class MapT> MapT cast() | Anchor |
|---|
| _BitmapMap(boost::shared_ptr<detail:_1 |
|---|
| _BitmapMap(boost::shared_ptr<detail:_1 |
|---|
|
BitmapMap(boost::shared_ptr<detail::BitmapMapImpl>)构造器该构造器仅限SDK内部使用。 | Anchor |
|---|
| _BitmapMap(const_BitmapMap&)构造器 |
|---|
| _BitmapMap(const_BitmapMap&)构造器 |
|---|
|
BitmapMap(const BitmapMap&)构造器拷贝构造函数。 | Anchor |
|---|
| _BitmapMap&_operator | (const_BitmapMa |
|---|
|
BitmapMap& operator=(const BitmapMap&)运算符赋值运算符。 | Anchor |
|---|
| _BitmapMapPixelFormat_getMapFormat() |
|---|
| _BitmapMapPixelFormat_getMapFormat() |
|---|
|
BitmapMapPixelFormat getMapFormat()获得地图的像素格式。 | Anchor |
|---|
| _Toc448250559 |
|---|
| _Toc448250559 |
|---|
|
| Anchor |
|---|
| _Toc462933641 |
|---|
| _Toc462933641 |
|---|
|
rpos::features::location_provider::BitmapMapPixelFormat枚举概览BitmapMapPixelFormat枚举表示位图地图的像素格式。 头文件rpos/features/location_provider.h 枚举项BitmapMapPixelFormat8Bit | Anchor |
|---|
| _BitmapMapPixelFormat8Bit |
|---|
| _BitmapMapPixelFormat8Bit |
|---|
|
BitmapMapPixelFormat8Bit位图中的每个像素占用1个字节。 | Anchor |
|---|
| _Toc448250560 |
|---|
| _Toc448250560 |
|---|
|
| Anchor |
|---|
| _Toc462933642 |
|---|
| _Toc462933642 |
|---|
|
rpos::features::motion_planner::Path类概览Path对象是一系列Location对象的集合,代表一条路径。 头文件rpos/features/motion_planner.h 构造器Path(const std::vector<rpos::core::Location>&)
Path(const Path&) 运算符Path& operator=(const Path&) 方法std::vector<rpos::core::Location>& getPoints() | Anchor |
|---|
| _Path(const_std::vector<core::Locati |
|---|
| _Path(const_std::vector<core::Locati |
|---|
|
Path(const std::vector<rpos::core::Location>&)构造器创建一个由一系列点组成的路径。 | Anchor |
|---|
| _Path(const_Path&)构造器 |
|---|
| _Path(const_Path&)构造器 |
|---|
|
Path(const Path&)构造器拷贝构造函数。 | Anchor |
|---|
| _Path&_operator | (const_Path&) |
|---|
|
Path& operator=(const Path&)运算符赋值运算符。 | Anchor |
|---|
| _std::vector<core::Location>&_getPoi |
|---|
| _std::vector<core::Location>&_getPoi |
|---|
|
std::vector<rpos::core::Location>& getPoints()获得路径中的所有点。 | Anchor |
|---|
| _Toc448250561 |
|---|
| _Toc448250561 |
|---|
|
| Anchor |
|---|
| _Toc462933643 |
|---|
| _Toc462933643 |
|---|
|
rpos::features::system_resource::LaserScan类概览LaserScan对象是一系列LaserPoint对象的集合,代表一次激光扫描的数据。 头文件rpos/features/system_resource.h 构造器LaserScan(const std::vector<rpos::core::LaserPoint>&)
LaserScan(const LaserScan&) 运算符LaserScan& operator=(const LaserScan&) 方法std::vector<rpos::core::LaserPoint>& getLaserPoints() | Anchor |
|---|
| _LaserScan(const_std::vector<core::L |
|---|
| _LaserScan(const_std::vector<core::L |
|---|
|
LaserScan(const std::vector<rpos::core::LaserPoint>&)构造器创建一个由一系列激光扫描点组成的扫描数据。 | Anchor |
|---|
| _LaserScan(const_LaserScan&)构造器 |
|---|
| _LaserScan(const_LaserScan&)构造器 |
|---|
|
LaserScan(const LaserScan&)构造器拷贝构造函数。 | Anchor |
|---|
| _LaserScan&_operator | (const_LaserSca |
|---|
|
LaserScan& operator=(const LaserScan&)运算符赋值运算符。 | Anchor |
|---|
| _std::vector<core::LaserPoint>&_getL |
|---|
| _std::vector<core::LaserPoint>&_getL |
|---|
|
std::vector<rpos::core::LaserPoint>& getLaserPoints()获取激光扫描数据。 | Anchor |
|---|
| _Toc448250562 |
|---|
| _Toc448250562 |
|---|
|
| Anchor |
|---|
| _Toc462933644 |
|---|
| _Toc462933644 |
|---|
|
rpos::robot_platforms::SlamwareCorePlatform类概览SlamwareCorePlatform对象代表一个基于Slamware的机器人,用以获取设备的状态、控制设备的行为。 头文件rpos/robot_platforms/slamware_core_platform.h 父类继承自rpos::core::RobotPlatform类 构造器SlamwareCorePlatform(boost::shared_ptr<detail::SlamwareCorePlatformImpl>)
SlamwareCorePlatform(const SlamwareCorePlatform&) 运算符SlamwareCorePlatform& operator=(const SlamwareCorePlatform&) 静态方法SlamwareCorePlatform connect(const std::string&, int, int) 方法void disconnect()
std::vector<rpos::core::Line> getWalls()
bool addWall(const rpos::core::Line&)
bool addWalls(const std::vector<rpos::core::Line>&)
bool clearWallById(const rpos::core::SegmentID&)
bool clearWalls()
std::vector<rpos::features::location_provider::MapType> getAvailableMaps()
[rpos::features::location_provider::Map getMap(
rpos::features::location_provider::MapType,
rpos::core::RectangleF,
rpos::features::location_provider::MapKind) | #_features::location_provider::Map_ge]
[bool setMap(
const rpos::features::location_provider::Map&,
rpos::features::location_provider::MapType,
rpos::features::location_provider::MapKind,bool partially=false) |
#_bool_setMap(_const_3][bool setMap( const core::Pose&,
const rpos::features::location_provider::Map&,
rpos::features::location_provider::MapType,
rpos::features::location_provider::MapKind, bool partially = false) | #_bool_setMap(_const_2]
[rpos::core::RectangleF getKnownArea(
rpos::features::location_provider::MapType,
rpos::features::location_provider::MapKind) | #_core::RectangleF_getKnownArea(featu]
bool clearMap()
bool clearMap(rpos::features::location_provider::MapKind kind)
[rpos::core::Location getLocation() |
#_rpos::core::Location_getLocation()]rpos::core::Pose getPose()
bool setPose(const rpos::core::Pose&)
[bool getMapLocalization() |
#_bool_getMapLocalization()_1][bool setMapLocalization(bool) |
#_bool_setMapLocalization(bool)_1][bool getMapUpdate() |
#_bool_getMapUpdate()_1][bool setMapUpdate(bool) |
#_bool_setMapUpdate(bool)_1]int getLocalizationQuality()
rpos::actions::MoveAction moveTo(const std::vector<rpos::core::Location>&, bool, bool)
rpos::actions::MoveAction moveTo(const rpos::core::Location&, bool, bool)
[rpos::actions::MoveAction moveTo( const std::vector< rpos::core::Location>&, rpos::robot::option::MoveOption&) |
#_actions::MoveAction_getCurrentActio]rpos::actions::MoveAction moveTo(const rpos::core::Location&, rpos::robot::option::MoveOption&)
rpos::actions::MoveAction moveBy(const rpos::core::Direction& direction)
[rpos::actions::MoveAction rotateTo(const rpos::core::Rotation&) |
#_rpos::actions::MoveAction_rotateTo(_1]rpos::actions::MoveAction rotate(const rpos::core::Rotation&)
[rpos::actions::MoveAction getCurrentAction() |
#_rpos::actions::MoveAction_getCurren]rpos::features::motion_planner::Path searchPath(const rpos::core::Location& location)
[rpos::actions::SweepMoveAction startSweep() |
#_rpos::actions::SweepMoveAction_star][rpos::actions::SweepMoveAction sweepSpot(const rpos::core::Location& location) |
#_rpos::actions::SweepMoveAction_swee][rpos::actions::MoveAction goHome() |
#_rpos::actions::MoveAction_goHome()_3][int getBatteryPercentage() |
#_int_getBatteryPercentage()]bool getBatteryIsCharging()
bool getDCIsConnected()
int getBoardTemperature()
std::string getSDPVersion()
std::string getSDKVersion()
[rpos::features::system_resource::LaserScan getLaserScan() |
#_rpos::features::system_resource::La][bool restartModule(rpos::features::system_resource::RestartMode mode = rpos::features::system_resource::RestartModeSoft) |
#_bool_restartModule(rpos::features::_1][bool setSystemParameter(const std::string& param, const std::string& value) |
#_bool_setSystemParameter(const_std::][std::string getSystemParameter(const std::string& param) |
#_std::string_getSystemParameter(cons][ rpos::features::system_resource::DeviceInfo getDeviceInfo() |
#_rpos::features::system_resource::De_2]void startCalibration( rpos::features::system_resource::CalibrationType type)
void stopCalibration()
rpos::features::system_resource::BaseHealthInfo getRobotHealth()
void clearRobotHealth(int errorCode)
bool configurateNetwork(rpos::features::system_resouce::NetworkMode mode, const std::map<std::string, std::string>& options)
std::map<std::string, std::string> getNetworkStatus()
[bool getSensors(std::vector<features::impact_sensor::ImpactSensorInfo>& sensors) |
#_bool_getSensors(std::vector<ImpactS][bool getSensorValues(std::map<features::impact_sensor::impact_sensor_id_t, features::impact_sensor::ImpactSensorValue>& values) |
#_bool_getSensorValues(std::map<impac][bool getSensorValues(const std::vector<features::impact_sensor::impact_sensor_id_t>& sensorIds, std::vector<features::impact_sensor::ImpactSensorValue>& values) |
#_bool_getSensorValues(const_std::vec][bool getSensorValue(features::impact_sensor::impact_sensor_id_t sensorId, features::impact_sensor::ImpactSensorValue& value) | #_bool_getSensorValue(features::impac]继承自rpos::core::RobotPlatform类的方法
std::vector<Feature> getFeatures()
template<class RobotPlatformT> RobotPlatformT cast() | Anchor |
|---|
| _SlamwareSdpPlatform(boost::shared_p |
|---|
| _SlamwareSdpPlatform(boost::shared_p |
|---|
|
SlamwareCorePlatform(boost::shared_ptr<detail::SlamwareCorePlatformImpl>)构造器该构造器仅限SDK内部使用。 | Anchor |
|---|
| _SlamwareSdpPlatform(const_SlamwareS |
|---|
| _SlamwareSdpPlatform(const_SlamwareS |
|---|
|
SlamwareCorePlatform(const SlamwareCorePlatform&)构造器拷贝构造函数。 | Anchor |
|---|
| _SlamwareSdpPlatform&_operator | (cons |
|---|
|
SlamwareCorePlatform& operator=(const SlamwareCorePlatform&)运算符赋值运算符。 | Anchor |
|---|
| _SlamwareSdpPlatform_connect(const_s |
|---|
| _SlamwareSdpPlatform_connect(const_s |
|---|
|
SlamwareCorePlatform connect(const std::string&, int, int)连接到指定的Slamware设备。 参数 |
名称 | 类型 | 说明 |
host | const std::string& | Slamware Core的IP地址 |
port | int | Slamware Core的端口(通常为1445) |
timeout_in_ms | int | 连接超时时间,单位为毫秒 |
| Anchor |
|---|
| _void_disconnect() |
|---|
| _void_disconnect() |
|---|
|
void disconnect()断开与CORE之间的连接。
| Anchor |
|---|
| _rpos::features::ArtifactProvider_ge |
|---|
| _rpos::features::ArtifactProvider_ge |
|---|
|
| Anchor |
|---|
| _Rpos::features::ImpactSensor_getImp |
|---|
| _Rpos::features::ImpactSensor_getImp |
|---|
|
| Anchor |
|---|
| _std::vector<rpos::core::Line>_getWa_1 |
|---|
| _std::vector<rpos::core::Line>_getWa_1 |
|---|
|
std::vector<rpos::core::Line> getWalls()获取系统中所有的虚拟墙。
| Anchor |
|---|
| _bool_addWall(const_rpos::core::Line_1 |
|---|
| _bool_addWall(const_rpos::core::Line_1 |
|---|
|
bool addWall(const rpos::core::Line&)添加虚拟墙。
| Anchor |
|---|
| _bool_addWalls(const_std::vector<rpo_1 |
|---|
| _bool_addWalls(const_std::vector<rpo_1 |
|---|
|
bool addWalls(const std::vector<rpos::core::Line>&)添加多个虚拟墙。
| Anchor |
|---|
| _bool_clearWallById(const_rpos::core_1 |
|---|
| _bool_clearWallById(const_rpos::core_1 |
|---|
|
bool clearWallById(const rpos::core::SegmentID&)清除指定的虚拟墙。
| Anchor |
|---|
| _bool_clearWalls()_1 |
|---|
| _bool_clearWalls()_1 |
|---|
|
bool clearWalls()清除所有的虚拟墙。
| Anchor |
|---|
| _std::vector<features::location_prov |
|---|
| _std::vector<features::location_prov |
|---|
|
std::vector<rpos::features::location_provider::MapType> getAvailableMaps()获得该Slamware CORE提供的所有地图类型。
| Anchor |
|---|
| _features::location_provider::Map_ge |
|---|
| _features::location_provider::Map_ge |
|---|
|
rpos::features::location_provider::Map getMap(rpos::features::location_provider::MapType, rpos::core::RectangleF, rpos::features::location_provider::MapKind)获得该Slamware CORE提供的指定地图类型指定区域的地图数据。
参数
名称 | 类型 | 说明 |
type | rpos::features::location_provider::MapType | 地图的数据类型 |
area | core::RectangleF | 地图的区域 |
kind | rpos::features::location_provider::MapKind | 地图类型 |
示例
rpos::feature::location_provider:MapType mapType = rpos::feature::location_provider:MapType::MapTypeBitmap8Bit;
rpos::feature::location_provider:Mapkind mapKind = rpos::feature::location_provider:MapKind::EXPLORERMAP;
rpos::core::Rectangle knownArea = robotPlatform.getKnownArea(mapType, mapKind);
rpos::feature::location_provider:Map map = robotPlatform.getMap(mapType, knownArea, mapKind); |
注: 扫地机版本mapkind可以使用SWEEPERMAP
| Anchor |
|---|
| _bool_setMap(_const |
|---|
| _bool_setMap(_const |
|---|
|
| Anchor |
|---|
| _bool_setMap(_const_3 |
|---|
| _bool_setMap(_const_3 |
|---|
|
bool setMap(const rpos::features::location_provider::Map&,rpos::features::location_provider::MapType,rpos::features::location_provider::MapKind, bool partially)上载指定地图类型指定区域的地图数据到该Slamware CORE。
参数
名称 | 类型 | 说明 |
map | rpos::features::location_provider::Map | 地图 |
type | rpos::features::location_provider::MapType | 地图数据类型 |
kind | rpos::features::location_provider::MapKind | 地图类型 |
partially | bool | 是否部分更新地图 |
示例
rpos::feature::location_provider:MapType mapType = rpos::feature::location_provider:MapType::MapTypeBitmap8Bit;
rpos::feature::location_provider:Mapkind mapKind = rpos::feature::location_provider:MapKind::EXPLORERMAP;
rpos::core::Rectangle knownArea = robotPlatform.getKnownArea(mapType, mapKind);
rpos::feature::location_provider:Map map = robotPlatform.getMap(mapType, knownArea, mapKind);
bool bRet = robotPlatform.setMap(map, mapType, mapKind); |
| Anchor |
|---|
| _bool_setMap(_const_2 |
|---|
| _bool_setMap(_const_2 |
|---|
|
bool setMap( const core::Pose& pose, const rpos::features::location_provider::Map&, rpos::features::location_provider::MapType, rpos::features::location_provider::MapKind, bool partially)上载指定地图类型指定区域的地图数据到该Slamware CORE。
参数
名称 | 类型 | 说明 |
pose | core::Pose | 机器人的pose信息 |
map | rpos::features::location_provider::Map | 地图 |
type | rpos::features::location_provider::MapType | 地图数据类型 |
kind | rpos::features::location_provider::MapKind | 地图类型 |
partially | bool | 是否部分更新地图 |
示例
rpos::core::Pose pose;
rpos::feature::location_provider:MapType mapType = rpos::feature::location_provider:MapType::MapTypeBitmap8Bit;
rpos::feature::location_provider:Mapkind mapKind = rpos::feature::location_provider:MapKind::EXPLORERMAP;
rpos::core::Rectangle knownArea = robotPlatform.getKnownArea(mapType, mapKind);
rpos::feature::location_provider:Map map = robotPlatform.getMap(mapType, knownArea, mapKind);
bool bRet = robotPlatform.setMap(pose, map, mapType, mapKind); |
| Anchor |
|---|
| _core::RectangleF_getKnownArea(featu |
|---|
| _core::RectangleF_getKnownArea(featu |
|---|
|
rpos::core::RectangleF getKnownArea(rpos::features::location_provider::MapType, rpos::features::location_provider::MapKind)获得指定地图类型的地图中,已经完成建图的区域。
示例
rpos::feature::location_provider:MapType mapType = rpos::feature::location_provider:MapType::MapTypeBitmap8Bit;
rpos::feature::location_provider:Mapkind mapKind = rpos::feature::location_provider:MapKind::EXPLORERMAP;
rpos::core::Rectangle knownArea = robotPlatform.getKnownArea(mapType, mapKind); |
| Anchor |
|---|
| _bool_clearMap() |
|---|
| _bool_clearMap() |
|---|
|
bool clearMap()清除地图数据。
| Anchor |
|---|
| _bool_clearMap(rpos::features::locat |
|---|
| _bool_clearMap(rpos::features::locat |
|---|
|
bool clearMap(rpos::features::location_provider::MapKind kind)清除指定地图类型的地图数据。
| Anchor |
|---|
| _core::Location_getLocation()_1 |
|---|
| _core::Location_getLocation()_1 |
|---|
|
| Anchor |
|---|
| _rpos::core::Location_getLocation() |
|---|
| _rpos::core::Location_getLocation() |
|---|
|
rpos::core::Location getLocation()获得机器人在上述地图坐标系统中的坐标。
| Anchor |
|---|
| _core::Pose_getPose()_1 |
|---|
| _core::Pose_getPose()_1 |
|---|
|
rpos::core::Pose getPose()获得机器人在上述地图坐标系统中的姿态。
| Anchor |
|---|
| _bool_setPose(const_core::Pose&) |
|---|
| _bool_setPose(const_core::Pose&) |
|---|
|
bool setPose(const core::Pose&)获得机器人在上述地图坐标系统中的姿态。
| Anchor |
|---|
| _bool_getMapLocalization()_1 |
|---|
| _bool_getMapLocalization()_1 |
|---|
|
bool getMapLocalization()获取地图定位。
| Anchor |
|---|
| _bool_setMapLocalization(bool)_1 |
|---|
| _bool_setMapLocalization(bool)_1 |
|---|
|
bool setMapLocalization(bool)设定是否启用定位功能。
| Anchor |
|---|
| _bool_getMapUpdate()_1 |
|---|
| _bool_getMapUpdate()_1 |
|---|
|
bool getMapUpdate()获得是否启用地图更新功能。
| Anchor |
|---|
| _bool_setMapUpdate(bool)_1 |
|---|
| _bool_setMapUpdate(bool)_1 |
|---|
|
bool setMapUpdate(bool)设定是否启用地图更新功能。
| Anchor |
|---|
| _int_getLocalizationQuality() |
|---|
| _int_getLocalizationQuality() |
|---|
|
int getLocalizationQuality()获取雷达定位点的可信度(返回一个0到100的数值,数值越高 当前雷达点的定位越可信,建议取50以上的定位点)
| Anchor |
|---|
| _actions::MoveAction_moveTo(const_st |
|---|
| _actions::MoveAction_moveTo(const_st |
|---|
|
rpos::actions::MoveAction moveTo( const std::vector< rpos::core::Location>&, bool, bool)让机器人沿着路径移动(机器人会逐一走过路径中的节点,在节点之间尽量走圆滑的曲线,如果遇到障碍物,机器人会自动避开)。
参数详细参考 rpos::action::MoveAction MoveTo(const std::vector<rpos::core::Location>&, bool, bool)
| Anchor |
|---|
| _actions::MoveAction_moveTo(const_co |
|---|
| _actions::MoveAction_moveTo(const_co |
|---|
|
rpos::actions::MoveAction moveTo(const rpos::core::Location&, bool, bool)让机器人移动到目标位置。
参数详细参考 rpos::action::MoveAction MoveTo(const rpos::core::Location&, bool, bool)
| Anchor |
|---|
| _actions::MoveAction_getCurrentActio |
|---|
| _actions::MoveAction_getCurrentActio |
|---|
|
| Anchor |
|---|
| _rpos::actions::MoveAction_rotateTo( |
|---|
| _rpos::actions::MoveAction_rotateTo( |
|---|
|
| Anchor |
|---|
| _rpos::actions::MoveAction_moveTo(_c |
|---|
| _rpos::actions::MoveAction_moveTo(_c |
|---|
|
rpos::actions::MoveAction moveTo( const std::vector< rpos::core::Location>&, rpos::robot::option::MoveOption &)让机器人沿着路径移动(机器人会逐一走过路径中的节点,并根据MoveAction参数的变量决定机器人行走的方式和移动过朝向)。
参数
名称 | 类型 | 说明 |
locations | const std::vector
<rpos::core::Location>& | 期望机器人经过的点 |
moveOption | rpos::robot::option::MoveOption | 如果机器人正在执行其他的移动动作,该参数决定新的点是追加或是替换既有节点 |
moveOption详细可参考rpos::robot::option::MoveOption
示例
std::vector<rpos::core::Location> locations;
rpos::core::Location location(1,1);
locations.push
rpos::robot::option::MoveAction moveOption;
moveOption.appending = false;
moveOption.isMilestone = true;
rpos::core::Pose pose(Rotation(2));
rpos::robot::heading::RobotHeading robotHeading(rpos::robot::heading::HeadingMode::HeadingModeFixAngle, pose);
moveOption.robotHeading = robotHeading;
rpos::actions::MoveAction moveInfo = robotPlatform.moveTo(locations, moveOption); |
| Anchor |
|---|
| _rpos::actions::MoveAction_moveTo(co_2 |
|---|
| _rpos::actions::MoveAction_moveTo(co_2 |
|---|
|
| Anchor |
|---|
| _rpos::actions::MoveAction_moveTo(co |
|---|
| _rpos::actions::MoveAction_moveTo(co |
|---|
|
rpos::actions::MoveAction moveTo(const rpos::core::Location&, rpos::robot::option::MoveOption&)让机器人沿着路径移动(机器人会逐一走过路径中的节点,并根据MoveAction参数的变量决定机器人行走的方式和移动过朝向)。
详细参考 rpos::actions::MoveAction moveTo(const std::vector<rpos::core::Location>&,rpos::robot::option::MoveAction&)
| Anchor |
|---|
| _rpos::actions::MoveAction_moveBy(co |
|---|
| _rpos::actions::MoveAction_moveBy(co |
|---|
|
rpos::actions::MoveAction moveBy(const rpos::core::Direction&)控制机器人的运行方向
参数
名称 | 类型 | 说明 |
direction | const rpos::core::Direction& | 机器人运行的方向 |
示例
rpos::core::ACTION_DIRECTION actionDirection = rpos::core::ACTION_DIRECTION::FORWARD;
rpos::core::Direction direction(actionDirection);
rpos::actions::MoveAction moveBy = platform.moveBy(direction); |
...
| Anchor |
|---|
| _rpos::actions::MoveAction_rotateTo(_1 |
|---|
| _rpos::actions::MoveAction_rotateTo(_1 |
|---|
|
值 | 单位 | 说明 |
FORWARD | | 向前 |
BACKWARD | | 向后 |
TURNRIGHT | | 向右 |
TURNLEFT | | 向左 |
rpos::actions::MoveAction rotateTo(const rpos::core::Rotation&)
使机器人水平转动到特定的角度。
| Anchor |
|---|
| _rpos::actions::MoveAction_rotate(co |
|---|
| _rpos::actions::MoveAction_rotate(co |
|---|
|
rpos::actions::MoveAction rotate(const rpos::core::Rotation&)使机器人水平转动一定的角度。
| Anchor |
|---|
| _rpos::actions::MoveAction_getCurren |
|---|
| _rpos::actions::MoveAction_getCurren |
|---|
|
rpos::actions::MoveAction getCurrentAction()获得机器人当前正在进行的移动动作。
您可以使用rpos::core::Action::isEmpty()方法判断它是否存在。当机器人当前没有正在进行的动作时,它rpos::core::Action::isEmpty()将会返回true。
| Anchor |
|---|
| _rpos::features::motion_planner::Pat |
|---|
| _rpos::features::motion_planner::Pat |
|---|
|
rpos::features::motion_planner::Path searchPath(const rpos::core::Location& location)使用机器人内置的寻路算法寻找前往指定目的地的路径。
| Anchor |
|---|
| _rpos::actions::MoveAction_goHome()_1 |
|---|
| _rpos::actions::MoveAction_goHome()_1 |
|---|
|
| Anchor |
|---|
| _rpos::actions::MoveAction_goHome() |
|---|
| _rpos::actions::MoveAction_goHome() |
|---|
|
| Anchor |
|---|
| _rpos::actions::SweepMoveAction_star_1 |
|---|
| _rpos::actions::SweepMoveAction_star_1 |
|---|
|
| Anchor |
|---|
| _rpos::actions::SweepMoveAction_star |
|---|
| _rpos::actions::SweepMoveAction_star |
|---|
|
rpos::actions::SweepMoveAction startSweep()命令机器人开始打扫。(此接口仅适用于扫地机版本)
| Anchor |
|---|
| _rpos::actions::SweepMoveAction_swee |
|---|
| _rpos::actions::SweepMoveAction_swee |
|---|
|
rpos::actions::SweepMoveAction sweepSpot(const rpos::core::Location& location)在机器人处于扫地状态下,可以命令机器人定点清扫。(此接口仅适用于扫地机版本)
| Anchor |
|---|
| _rpos::actions::MoveAction_goHome()_3 |
|---|
| _rpos::actions::MoveAction_goHome()_3 |
|---|
|
rpos::actions::MoveAction goHome()在机器人处于扫地状态下,可命令机器人返回充电位置。(此接口仅适用于扫地机版本)
| Anchor |
|---|
| _int_getBatteryPercentage() |
|---|
| _int_getBatteryPercentage() |
|---|
|
int getBatteryPercentage()获得机器人电池剩余电量(0表示完全没电,100表示电量全满)。
| Anchor |
|---|
| _bool_getBatteryIsCharging() |
|---|
| _bool_getBatteryIsCharging() |
|---|
|
bool getBatteryIsCharging()获得机器人是否正在充电。
| Anchor |
|---|
| _bool_getDCIsConnected() |
|---|
| _bool_getDCIsConnected() |
|---|
|
bool getDCIsConnected()获得直流电源是否插上。
| Anchor |
|---|
| _int_getBoardTemperature() |
|---|
| _int_getBoardTemperature() |
|---|
|
int getBoardTemperature()获得机器人核心温度。单位是0.1℃,比如该函数的返回结果为452,则表示机器人的核心温度为45.2℃。
| Anchor |
|---|
| _std::string_getSDPVersion() |
|---|
| _std::string_getSDPVersion() |
|---|
|
std::string getSDPVersion()获得机器人底盘的版本号。
| Anchor |
|---|
| _std::string_getSDKVersion() |
|---|
| _std::string_getSDKVersion() |
|---|
|
std::string getSDKVersion()获得SDK的版本号。
| Anchor |
|---|
| _features::system_resource::LaserSca |
|---|
| _features::system_resource::LaserSca |
|---|
|
| Anchor |
|---|
| _rpos::features::system_resource::La |
|---|
| _rpos::features::system_resource::La |
|---|
|
rpos::features::system_resource::LaserScan getLaserScan()获得上一次激光扫描的原始数据。| Anchor |
|---|
| _rpos::features::system_resource::De |
|---|
| _rpos::features::system_resource::De |
|---|
|
| Anchor |
|---|
| _bool_restartModule(rpos::features::_1 |
|---|
| _bool_restartModule(rpos::features::_1 |
|---|
|
bool restartModule(rpos::features::system_resource::RestartMode mode = rpos::features::system_resource::RestartModeSoft)根据指定的重启模式(默认软复位)执行重启操作。 重启模式: RestartModeSoft(软复位),重启SDK,速度较快。建议使用。 RestartModeHard(硬复位),速度较慢,需要几分钟时间。不建议经常使用。
| Anchor |
|---|
| _bool_setSystemParameter(const_std:: |
|---|
| _bool_setSystemParameter(const_std:: |
|---|
|
bool setSystemParameter(const std::string& param, const std::string& value)调整系统参数
参数
名称 | 类型 | 说明 |
param | const std::string& | 调整的参数名 |
value | Const std::string & | 调整的参数值 |
注:目前只支持调整系统速度的设置
param只能取值为SYSPARAM_ROBOT_SPEED
value对应可取如下三种
1.SYSVAL_ROBOT_SPEED_HIGH (高)
2.SYSVAL_ROBOT_SPEED_MEDIUM (中)
3.SYSVAL_ROBOT_SPEED_LOW (低)
示例
Bool bRet = platform.setSystemParameter(SYSPARAM_ROBOT_SPEED, SYSVAL_ROBOT_SPEED_HIGH); |
| Anchor |
|---|
| _std::string_getSystemParameter(cons |
|---|
| _std::string_getSystemParameter(cons |
|---|
|
| Anchor |
|---|
| _bool_restartModule(rpos::features:: |
|---|
| _bool_restartModule(rpos::features:: |
|---|
|
| Anchor |
|---|
| _std::string_getSystemParameter(cons_1 |
|---|
| _std::string_getSystemParameter(cons_1 |
|---|
|
std::string getSystemParameter(const std::string& param)获取系统参数
| Anchor |
|---|
| _bool_getMapLocalization() |
|---|
| _bool_getMapLocalization() |
|---|
|
| Anchor |
|---|
| _bool_setMapLocalization(bool) |
|---|
| _bool_setMapLocalization(bool) |
|---|
|
| Anchor |
|---|
| _bool_getMapUpdate() |
|---|
| _bool_getMapUpdate() |
|---|
|
| Anchor |
|---|
| _bool_setMapUpdate(bool) |
|---|
| _bool_setMapUpdate(bool) |
|---|
|
参数名称 | 类型 | 说明 |
param | const std::string& | 要获取的系统参数名 |
注:目前只支持调整系统速度的设置
param只能取值为SYSPARAM_ROBOT_SPEED
示例
std::string robotSpeed = platform.getSystemParameter(SYSPARAM_ROBOT_SPEED); |
| Anchor |
|---|
| _rpos::features::system_resource::De_2 |
|---|
| _rpos::features::system_resource::De_2 |
|---|
|
rpos::features::system_resource::DeviceInfo getDeviceInfo()获取设备信息。设备信息包括设备ID,制造商ID,制造商名称,型号ID,型号名称,硬件版本,软件版本。
具体返回值信息请参考:rpos::features::system_resource::DeviceInfo类
| Anchor |
|---|
| _Void_startCalibration(rpos::feature |
|---|
| _Void_startCalibration(rpos::feature |
|---|
|
Void startCalibration(rpos::features::system_resource::CalibrationType type)机器人开始进行磁罗盘校正
| Anchor |
|---|
| _Void_stoptCalibration() |
|---|
| _Void_stoptCalibration() |
|---|
|
Void stoptCalibration()机器人停止进行磁罗盘校正
| Anchor |
|---|
| _rpos::features::system_resource::Ba |
|---|
| _rpos::features::system_resource::Ba |
|---|
|
rpos::features::system_resource::BaseHealthInfo getRobotHealth()获取机器人当前的状态信息
| Anchor |
|---|
| _void_clearRobotHealth(int_errorCode |
|---|
| _void_clearRobotHealth(int_errorCode |
|---|
|
void clearRobotHealth(int errorCode)清除机器人当前出错的状态信息
| Anchor |
|---|
| _bool_configureNetwork(rpos::feature |
|---|
| _bool_configureNetwork(rpos::feature |
|---|
|
bool configureNetwork(rpos::features::system_resource::NetworkMode mode, const std::map<std::string, std::string>& options)配置机器人的网络信息
参数
网络状况 | ssid | password | channel |
NetworkModeAp | 可选 | 可选 | 可选 |
NetworkModeStation | 必选 | 可选 | – |
NetworkModeWifiDisabled | – | – | – |
注:目前暂只支持以上三中mode形式,ssid,password,channel三个选项的信息如上表(--表示不可用)
示例
std::map<std::string, std::string> options;
<ac:structured-macro ac:name="unmigrated-wiki-markup" ac:schema-version="1" ac:macro-id="841da966-044a-4bb6-a4d3-332dffb7ef37"><ac:plain-text-body><![CDATA[options["ssid"] = "Slamtec";
]]></ac:plain-text-body></ac:structured-macro>
<ac:structured-macro ac:name="unmigrated-wiki-markup" ac:schema-version="1" ac:macro-id="6ac6db17-0962-4de1-b493-a129fbb2b829"><ac:plain-text-body><![CDATA[options["password"] = "slamtect";
]]></ac:plain-text-body></ac:structured-macro>
Bool bRet = platform.configureNetwork(rpos::features::system_resource::NetworkMode::NetworkModeStation,options); |
| Anchor |
|---|
| _std::map<std::string,_std::string>_ |
|---|
| _std::map<std::string,_std::string>_ |
|---|
|
std::map<std::string, std::string> getNetworkStatus()获取机器人当前的网络信息。
注:目前返回的结果只包含mode,ssid和ip三个选项的值
| Anchor |
|---|
| _bool_getSensors(std::vector<ImpactS |
|---|
| _bool_getSensors(std::vector<ImpactS |
|---|
|
bool getSensors(std::vector<ImpactSensorInfo>& sensors)用于获取机器人上已安装的所有碰撞传感器,返回值为ImpactSensorInfo列表。
ImpactSensorInfo数据结构如下:
...
字段名称 | 单位 | 说明 |
Id | | Id字段为后续API中会用到的数值。 |
Pose | | Pose字段表示传感器的安装姿态,即传感器相对于机器人中间的位置和方向。 |
Type | | 如果机器人正在执行其他的移动动作,该参数表示传感器类型,为ImpactSensorTypeDigital 或ImpactSensorTypeAnalog中的一种。前者表示普通的碰撞传感器,只有发生碰撞和不发生碰撞两种状态。后者表示距离传感器,如超声波测距传感器,红外测距传感器等。 |
refreshFreq | Hz | 表示传感器刷新频率,Hz表示每秒刷新次数。 |
| Anchor |
|---|
| _bool_getSensorValues(std::map<impac |
|---|
| _bool_getSensorValues(std::map<impac |
|---|
|
bool getSensorValues(std::map<impact_sensor_id_t, ImpactSensorValue>& values)用于获取当前碰撞传感器状态,返回值为map,key字段为上述API中获得的id,value字段是ImpactSensorValue类型,数据结构如下:
...
字段名称 | 类型 | 单位 | | 说明 |
Time | Long | 微秒 | 表示获得该数据的时间。 | |
Value | Float | 米 | 表示该碰撞传感器检测到的与障碍物之间的距离。若传感器为数字传感器,则0~FLT_EPSILON表示发生了碰撞,FLT_MAX表示没有发生碰撞(建议用"<FLT_EPSILON"来判断);若传感器为模拟传感器,则value表示传感器和障碍物之间的距离,FLT_MAX表示没有检测到障碍物(建议用"<1000"来判断,1000为场景中最长轴长度的两倍)。 | |
| Anchor |
|---|
| _bool_getSensorValues(const_std::vec |
|---|
| _bool_getSensorValues(const_std::vec |
|---|
|
bool getSensorValues(const std::vector<features::impact_sensor::impact_sensor_id_t>& sensorIds, std::vector<features::impact_sensor::ImpactSensorValue>& values)获取指定传感器的数据。返回值为ImpactSensorValue数组。
| Anchor |
|---|
| _bool_getSensorValue(features::impac |
|---|
| _bool_getSensorValue(features::impac |
|---|
|
bool getSensorValue(features::impact_sensor::impact_sensor_id_t sensorId, features::impact_sensor::ImpactSensorValue& value)获取指定传感器的数据。返回值为ImpactSensorValue。
| Anchor |
|---|
| _Toc462933645 |
|---|
| _Toc462933645 |
|---|
|
修订历史日期 | 说明 |
2014-9-2 | 初始版本 |
2015-6-8 | 更名为Slamware SDK Api Reference,并增加大量内容 |
2015-12-30 | 增加SDK中与碰撞传感器相关的2个API的介绍
补充内容API: rpos::features::location_provider::BitmapMap::setMapData
移除RoboPeak logo |
2016-04-12 | 增加SDK中start sweep与spot cleaning的API介绍 |
2016-04-19 | 更换封面图片 |
2016-05-26 | 更新文档模板 |
2016-06-14 | 删除SlamwareCorePlatform中重复的feature方法介绍。 |
2016-07-05 | 增加DeviceInfo类解释 |
| Anchor |
|---|
| _Toc462933646 |
|---|
| _Toc462933646 |
|---|
|
附录| Anchor |
|---|
| _Toc462933647 |
|---|
| _Toc462933647 |
|---|
|
图表索引图表 1-1 SLAMWARE SDK 目录结构
图表 1-2 SLAMWARE SDK 头文件组织结构
图表3-1 新建项目
图表3-2 向导概览
图表3-3项目设置
图表3-4 项目属性页
图表3-5 VC++目录
图表3-6 包含目录
图表3-7 库目录
图表3-8 完成配置的属性页
图表3-9 新建源文件
图表4-1 API 概览