...
| Code Block |
|---|
| language | java |
|---|
| theme | Midnight |
|---|
| title | 参考代码 |
|---|
| linenumbers | true |
|---|
|
try {
IMoveAction action;
MoveOption moveOption = new MoveOption();
moveOption.setPrecise(true);
moveOption.setMilestone(true);
Log.d(TAG, "==============================================");
Log.d(TAG, "Move To");
action = robotPlatform.moveTo(new Location(1, -3, 0), moveOption, 0);
while(action.getRemainingPath().getPoints().isEmpty()) {
Log.d(TAG, "remaining path is null");
sleep(1);
}
Log.d(TAG, "create path successful ...");
Vector<Location> vactor = action.getRemainingPath().getPoints();
Log.d(TAG, "vactor.size() = " + vactor.size());
Log.d(TAG, "vactor.isEmpty() = " + vactor.isEmpty());
Log.d(TAG, "==============================================");
action.waitUntilDone();
if (action.getStatus() == ActionStatus.ERROR) {
Log.d(TAG, "Action Failed: " + action.getReason());
}
} catch (ConnectionTimeOutException e) {
/* Exception Handle code*/
...
}
|
...
测试现象
在底盘周围放置障碍物,使其无法规划出一条能够到达目标点的路径,测试现象如下,在底盘周围放置障碍物,使其无法规划出一条能够到达目标点的路径,地图、障碍物、目标点的情况见下图
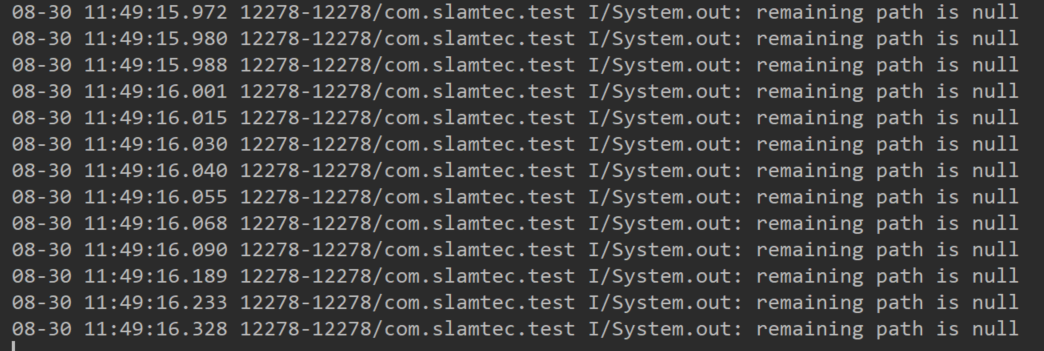 Image Removed
Image Removed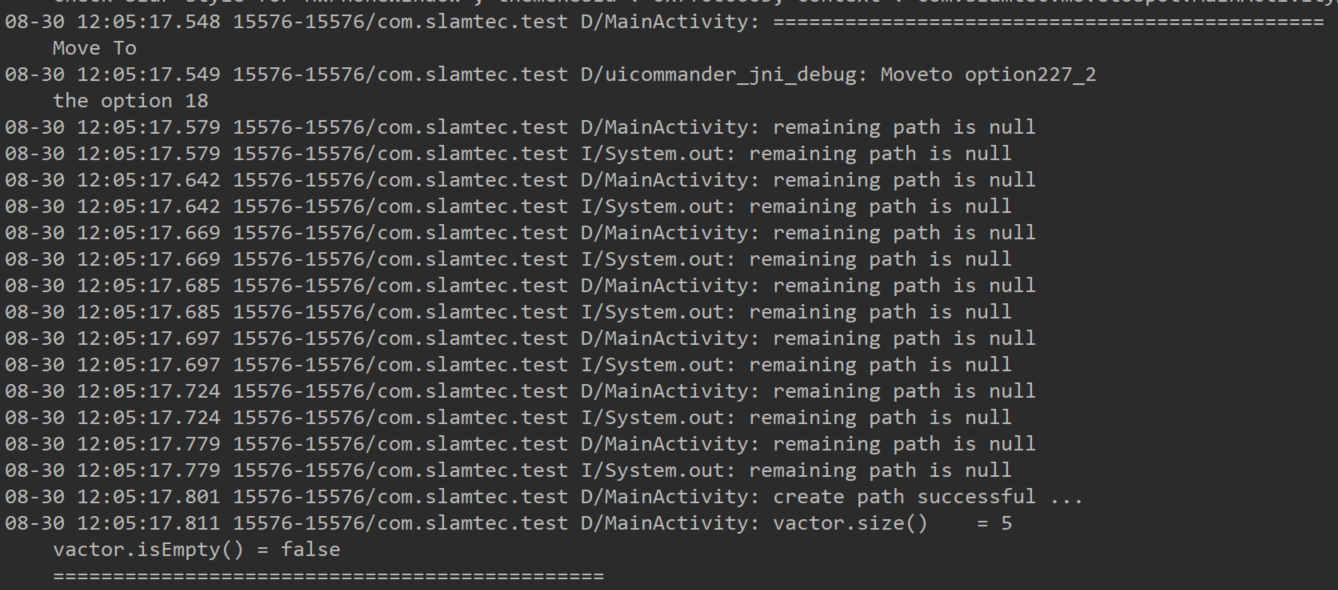 Image Removed
Image Removed
...
运行程序Logcat输出如下
...
Image Added
...
撤除底盘旁边的障碍物,再次运行测试程序,底盘在间隔一段时间后规划出路径,并沿着路径中的7个点逐点导航到目标点
...
...
| name | Slamtec RoboStudio 2018_8_30 12_01_43.mp4 |
|---|
|
Logcat输出如下,可以看到slamware在几毫秒后规划出路径,路径中共有7个点
 Image Added
Image Added
使用接口加载地图
1.使用接口加载stcm/bmp格式地图的示例代码可以参考:KBSW180120 Win32-CompositeMap格式地图的读写
注意:loadfile()接口以及setcompositmap()接口之间需要一定时间间隔,否则系统可能会抛异常。
2.重定位可以参考:KBSW180130 Win32-重定位。。。。。