本页介绍了composite_map_demo的用法, 主要包含对.stcm地图格式的composite map的读写操作
本页内容
| Table of Contents | ||
|---|---|---|
|
运行环境准备
软件平台
- Visual Studio 2010 SP1
- Slamware Windows SDK:Slamware Windows SDK
- RoboStudio(用于显示地图):Robostudio installer
Sample Code:
Info 使用更高版本的Visual Studio可能会带来编译异常。
使用Visual Studio 2010(无SP1)可能会因为无法与.Net Framework兼容而报编译错误,此时增加SP1更新包即可解决问题
硬件平台
(以下任选其一)
- Slamware SDP mini
- Slamware SDP
- Slamware 套装 (基于Slamware导航方案的用户机器人系统)
- Zeus/Apollo等底盘系统
例程下载
编译运行
打开samples工程,右键composite_map_demo, 将此工程设置成StartUp project
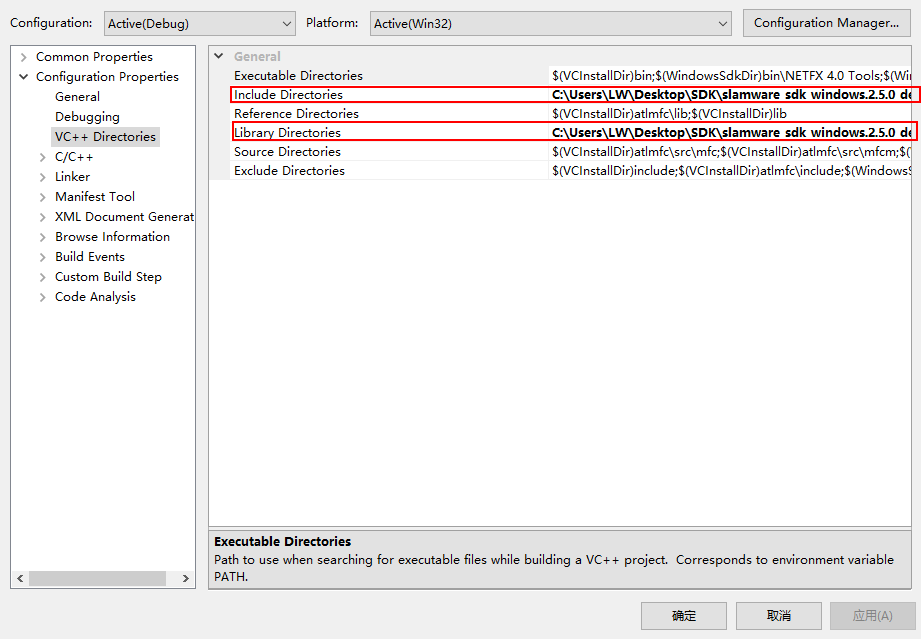
右键composite_map_demo, 打开属性选项,将Slamware SDK 的include目录和lib目录添加到工程
Info Slamware SDK的include和lib目录无需复制到参考例程目录,只需在Visual Studio里指定路径即可。
- 右键composite_map_demo, 打开properties选项,设置Command Arguments 如下图,
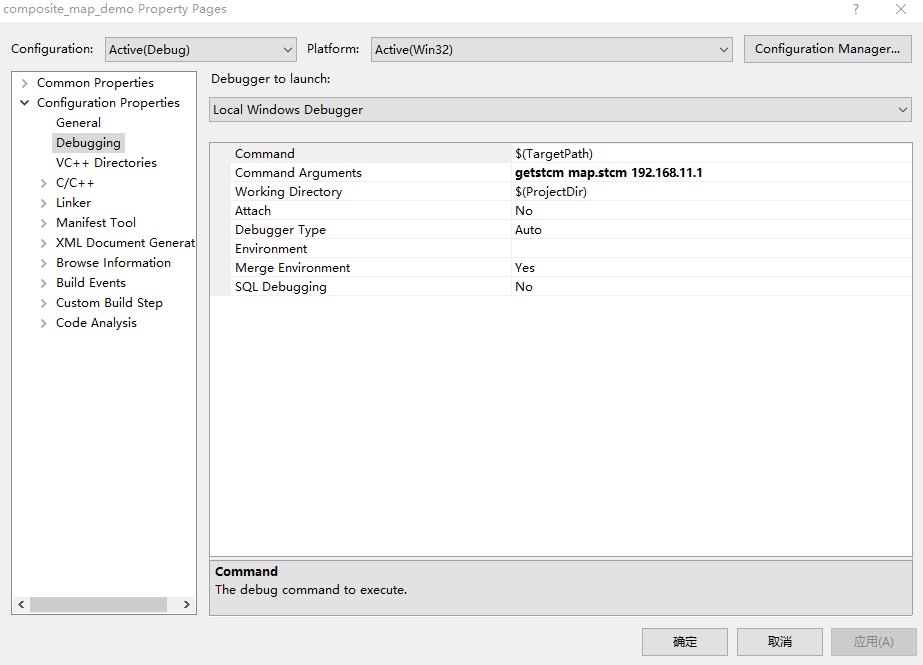
格式说明:composite_map_demo [OPTS] [filename] <SDP IP Address>
SDP IP Address The ip address string of the SLAMWARE SDP
getstcm filename download compositeMap
setstcm filename upload compositeMap
-h Show this message 点击F5运行
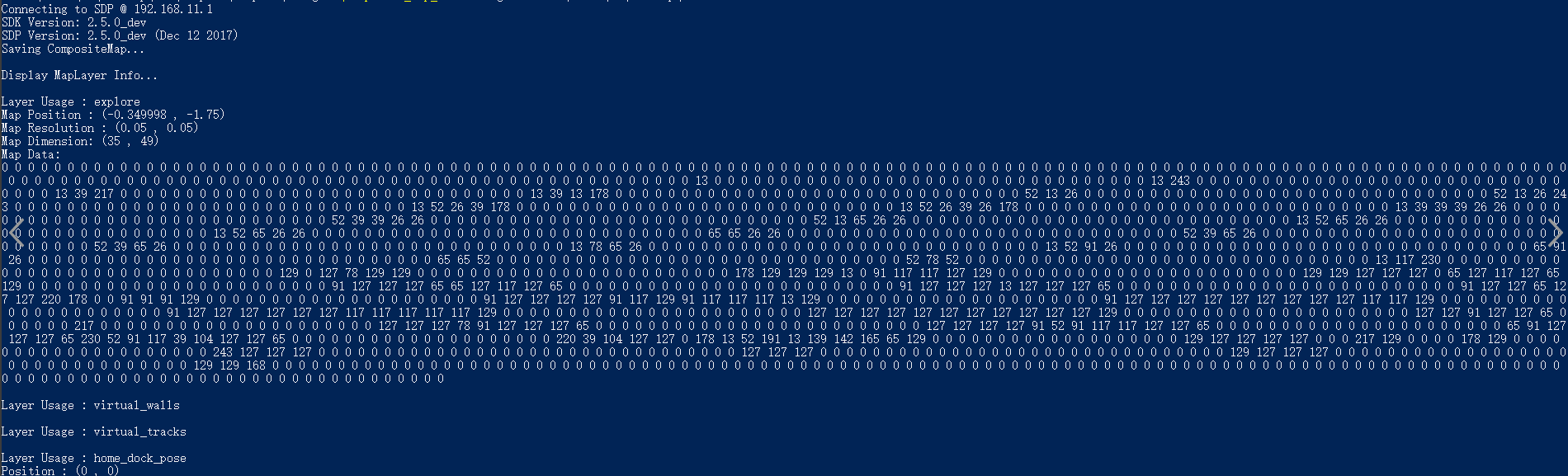
- composite_map_demo getstcm map.stcm 192.168.11.1 (从slamware里面读取composite map, 并生成map.stcm)
可以用Robostudio的地图编辑器来查看生成的地图: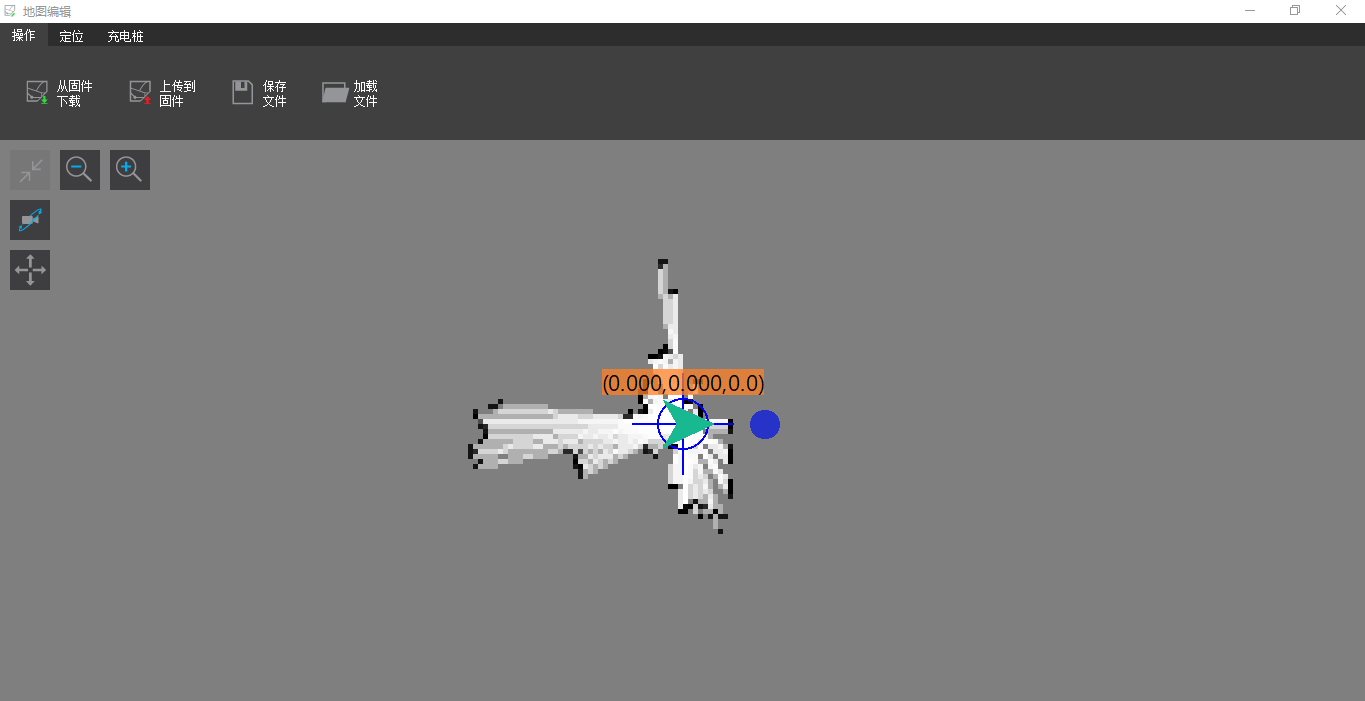
- composite_map_demo setstcm map.stcm 192.168.11.1(将名为map.stcm的地图上传至slamware)
可以在Robostudio中连上机器人,可以看到地图已经上传成功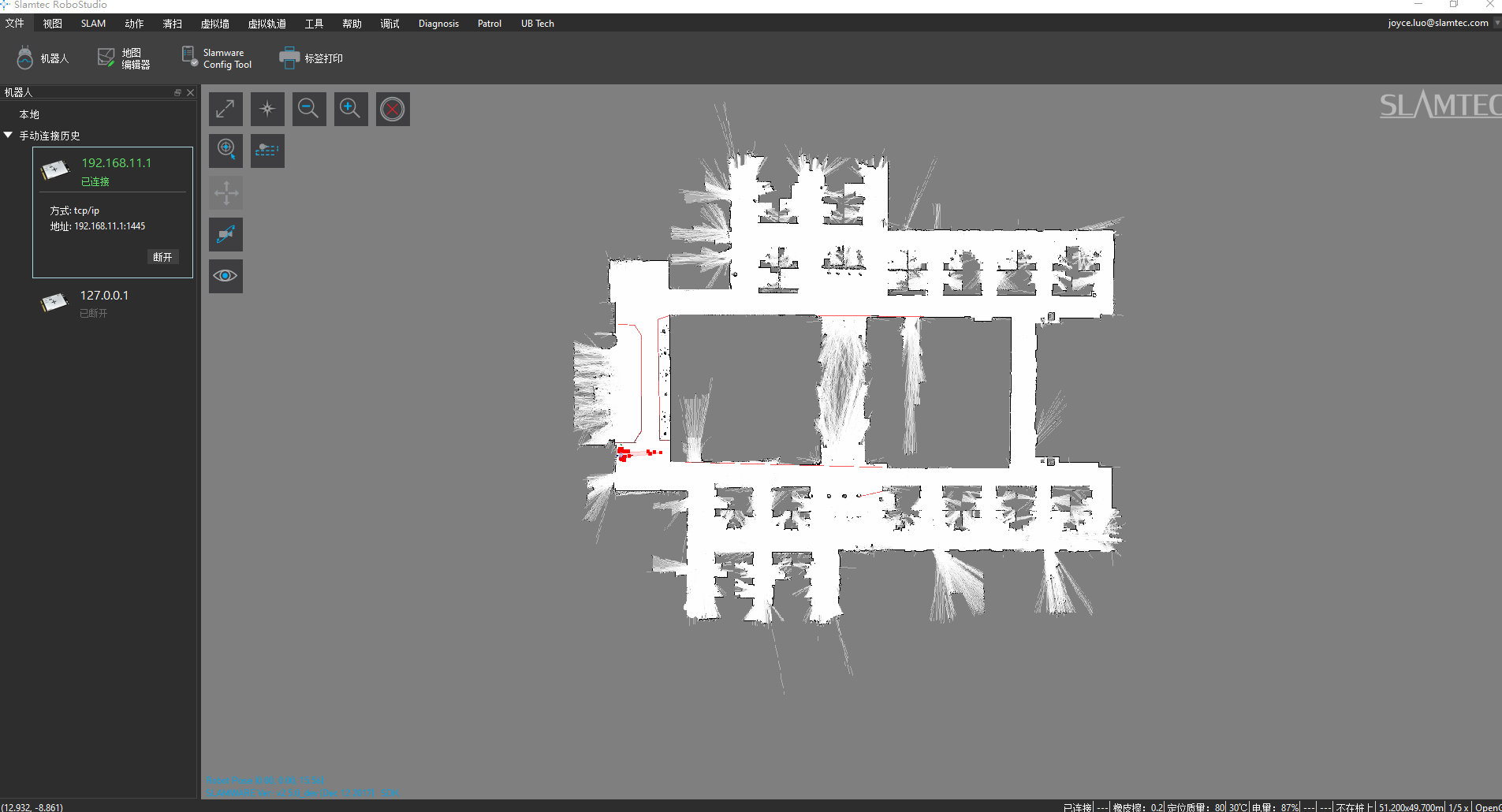
- composite_map_demo getstcm map.stcm 192.168.11.1 (从slamware里面读取composite map, 并生成map.stcm)
代码描述
- 从slamware模块下载composite map到客户端
| Code Block | ||||||||
|---|---|---|---|---|---|---|---|---|
| ||||||||
bool StcmMapWriter(const std::string file_name, SlamwareCorePlatform platform) {
CompositeMap composite_map = platform.getCompositeMap();
CompositeMapWriter composite_map_writer;
std::string error_message;
bool result = composite_map_writer.saveFile(error_message, file_name, composite_map);
return result;
} |
- 从客户端上传composite map至slamware模块
| Code Block | ||||||||
|---|---|---|---|---|---|---|---|---|
| ||||||||
bool StcmMapReader(const std::string file_path, rpos::core::Pose pose, SlamwareCorePlatform platform) {
CompositeMapReader composite_map_reader;
std::string error_message;
boost::shared_ptr<CompositeMap> composite_map(composite_map_reader.loadFile(error_message, file_path));
if (composite_map) {
platform.setCompositeMap((*composite_map), pose);
return true;
}
return false;
} |
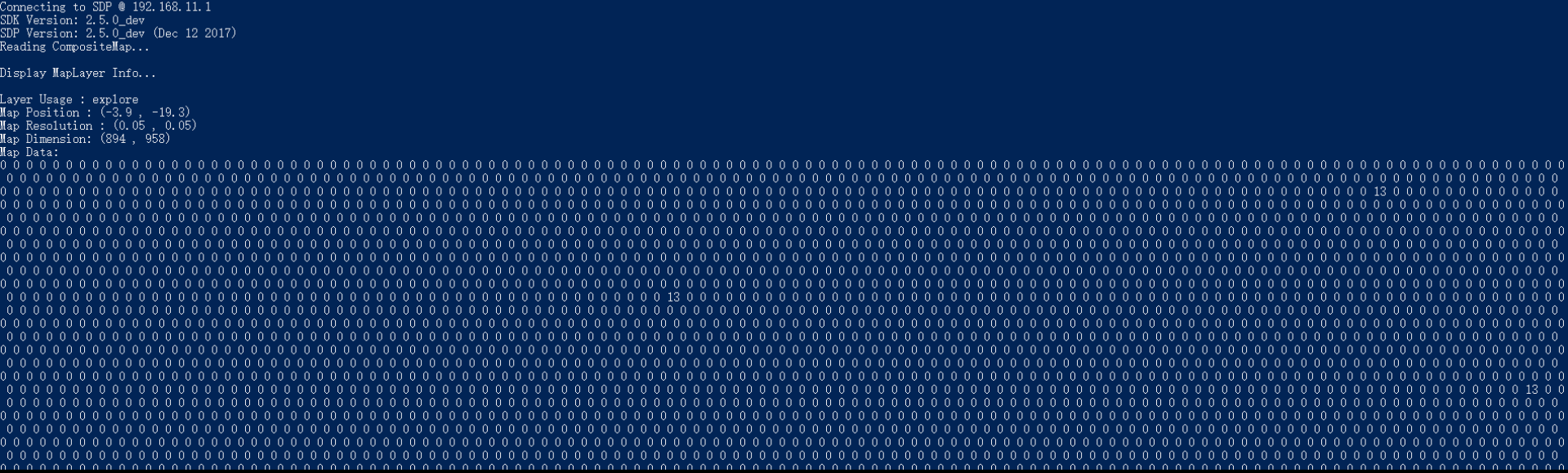
- 从composite map中读取虚拟轨道,虚拟墙等信息
| Code Block | ||||||||
|---|---|---|---|---|---|---|---|---|
| ||||||||
CompositeMapReader composite_map_reader;
std::string error_message;
boost::shared_ptr<CompositeMap> composite_map(composite_map_reader.loadFile(error_message, file_path));
if (composite_map) {
for (auto it = composite_map->maps().begin(); it != composite_map->maps().end(); ++it) {
auto layer = *it;
std::string usage = layer->getUsage();
std::string type = layer->getType();
std::cout << "Layer Usage : " << usage << std::endl;
//get grid map layer
if (type == GridMapLayer::Type) {
auto grid_map = boost::dynamic_pointer_cast<GridMapLayer>(layer);
std::cout << "Map Position : (" << grid_map->getOrigin().x() << " , " <<
grid_map->getOrigin().y() << ")" <<std::endl;
std::cout << "Map Resolution : (" << grid_map->getResolution().x() <<
" , " << grid_map->getResolution().y() << ")" <<std::endl;
std::cout << "Map Dimension: (" << grid_map->getDimension().x() <<
" , " << grid_map->getDimension().y() << ")" <<std::endl;
std::cout << "Map Data:" << std::endl;
for (auto it = grid_map->mapData().begin(); it != grid_map->mapData().end(); ++it) {
std::cout << (int)*it << " " ;
}
std::cout << std::endl << std::endl;
}
//get line map layer
else if (type == LineMapLayer::Type) {
auto line_map = boost::dynamic_pointer_cast<LineMapLayer>(layer);
for (auto it = line_map->lines().begin(); it != line_map->lines().end(); ++it) {
auto line = it->second;
std::cout << "start: (" << line.start.x() << " , " << line.start.y() << ")" << std::endl;
std::cout << "end: (" << line.end.x() << " , " << line.end.y() << ")" << std::endl;
}
std::cout << std::endl;
}
//get pose map layer
else if (type == PoseMapLayer::Type) {
auto pose_map = boost::dynamic_pointer_cast<PoseMapLayer>(layer);
for (auto it = pose_map->poses().begin(); it != pose_map->poses().end(); ++it) {
auto pos = it->second;
std::cout << "Position : (" << pos.pose.x() << " , " << pos.pose.y() << ")" << std::endl;
}
std::cout << std::endl;
}
else if (type == PointsMapLayer::Type) {
//TODO: get Points map layer
std::cout << std::endl;
}
else {
//TODO: get unknown map layer
std::cout << std::endl;
}
} |