...
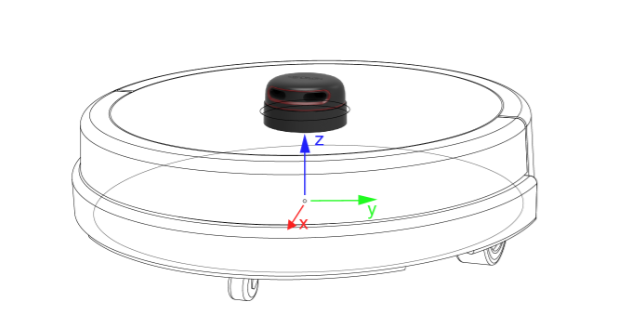
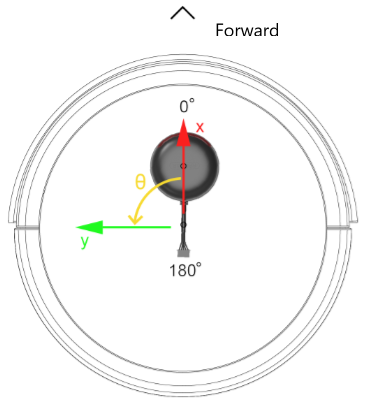
In the chassis coordinate system, the positive X points to the forward direction of robot, the positive y points to the left, the positive Z points to the top. In an angle coordinate system, the x positive is the 0°, and an counterclockwise rotation will be considered as positive(see pictures below).
Robot Configuration
...