综述
| Excerpt |
|---|
SLAMWARE为SLAMTEC推出的,基于RPLIDAR 360°激光雷达的高性能室内定位导航解决方案。 考虑到用户在不同阶段的需要,SLAMTEC将SLAMWARE的集成过程分为3个阶段 |
...
| 阶段 | 说明 | 硬件 | 软件 | 备注 |
|---|---|---|---|---|
| 评估 | 在评估阶段,客户主要目的是验证基于SLAMWARE的室内导航定位解决方案是否能够满足客户的使用需求。 |
| SLAMTEC Robot Studio | 根据传感器数量和评估设备性能强弱的不同,当前评估选择可分为如下几种: SLAMWARE SDP Mini 提供了最基础的评估功能,只包含激光雷达、运动机构和里程计,是实现Slam方案的最小系统。 SLAMWARE SDP 为一款针对家用和轻商用机器人的评估平台,除上述传感器外,还配备了超声波传感器,碰撞传感器,防跌落传感器、离地检测传感器、卡机检测电阻、基于红外信标的自动回充充电座,同时具备比较完善的电源管理能力。 ZEUS机器人平台是针对重商用场合推出的机器人平台,除SDP系列中提供的传感器外,该平台还配备了后碰撞传感器、深度摄像头及可选配的控制模块(包含急停按钮、电源开关,系统开关等),它同时集成了大容量锂电池,可为机器人提供非常长的续航时间。(注:ZEUS机器人平台不提供卡机检测和离地检测功能。) |
| 验证 | 在验证阶段,客户主要目的是验证基于SLAMWARE的解决方案是否能够适用于客户的机器人和底盘。 |
|
| SLAMWARE Breakout是一块最小系统开发板。其内部集成了一枚STM32F103VET6处理器作为底盘的主控MCU,且各种外设IO口已分别引出方便集成。 同时针对该块开发板,SLAMTEC提供了参考固件方便大家集成和开发。 |
| 集成 | 在集成阶段,客户已认可SLAMWARE产品的性能,并确认能够与自身的底盘配合使用。此时需要将SLAMWARE解决方案整合到机器人中。 |
|
| SLAMWARE Core是可以批量订购的导航定位模块产品,采用Mini PCI-E的物理接口和自定义的电气接口。用户可自行设计底盘的主板,集成SLAMWARE Core实现室内定位导航功能。 |
系统构成
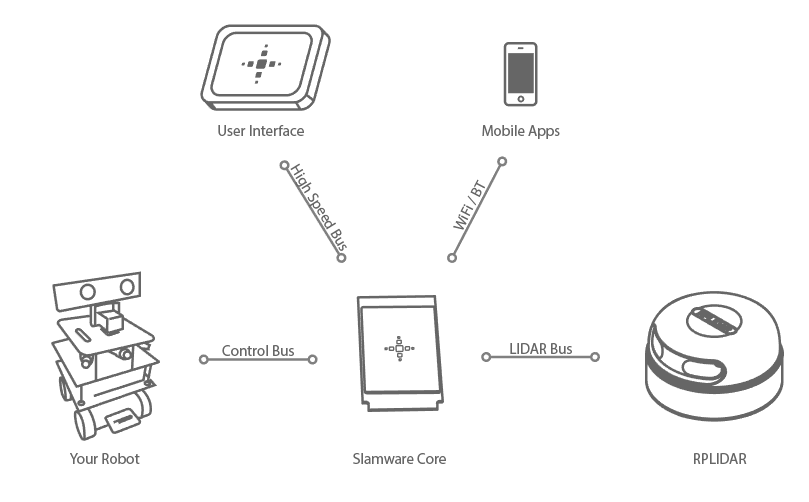
通常情况下,基于SLAMWARE解决方案的机器人主要由3部分组成:
...
一个最完整的Slamware Core系统如下图所示:
结构集成
将SLAMWARE解决方案集成到机器人中的机械结构方案相对比较简单,请参考如下集成说明:
- SLAMWARE解决方案结构集成说明
硬件集成
集成SLAMWARE的硬件方案主要由如下几种,用户可以根据实际需要和开发进度选择最适合的方式:
使用ZEUS通用服务机器人底盘
ZEUS是SLAMTEC推出的一款通用服务机器人平台,它集成了SLAMWARE定位导航解决方案,并集成了大量在商用环境中需要具备的结构和功能:
...
该平台大大简化了服务机器人产品的开发,缩短了产品从设计走向销售的流程和时间。
具体信息,请参考Zeus机器人平台产品页。
使用SLAMWARE SDP
为了方便客户使用和集成SLAMWARE解决方案,SLAMTEC还推出了SLAMWARE SDP 系列(Software Development Platform)供用户选择。该系列均为功能基本完备的机器人。
...
《TODO:基于SLAMWARE Breakout开发自己的机器人底盘》
使用SLAMWARE Breakout
SLAMWARE Breakout是针对有自己的机器人底盘客户的一款开发板。它已经集成了底盘的主控制器STM32F103VET6,并将IO口做了分配和定义。
...
可以看到,SLAMWARE Breakout已经集成了机器人底盘的主控制器,并完成了硬件连接,仅需外扩具体的外设即可使能自行设计的底盘。
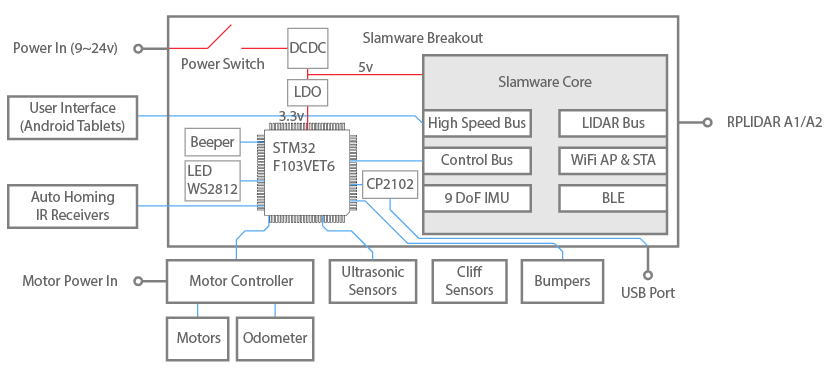
系统框图
基于Slamware Breakout的机器人的典型框图如下:
集成步骤
以下的集成内容并非所有的项目都是必须的,客户可根据自身实际需求来决定集成的外设。
- 设计电机驱动电路
- 设计碰撞传感器电路
- 设计跌落传感器电路
- 设计超声波传感器电路
- 设计自动回充电路
- 连接用户交互界面与Slamware Breakout
直接集成SLAMWARE Core
由于SLAMWARE Breakout为非批量发货产品,对于客户最终销售的产品,SLAMTEC不建议将SLAMWARE Breakout集成到产品中进行发货,而是直接使用SLAMWARE Core,并设计自己的机器人主板。
集成步骤
以下的集成内容并非所有的项目都是必须的,客户可以根据自身实际需求来决定集成的外设。
- 设计电源系统
- 设计RPLIDAR接口
- 连接底盘MCU与SLAMWARE Core
- 连接用户界面与SLAMWARE Core
- 设计碰撞传感器电路
- 设计跌落传感器电路
- 设计超声波传感器电路
- 设计自动回充电路
固件集成
基于参考固件集成
SLAMTEC提供了一份采用IAR编译器和STM32F103VET6的参考固件,便于客户开发自己的机器人底盘固件。客户可以根据机器人实际状况选择部分外设进行集成,集成步骤如下:
- 机器人配置
- 实现电源管理相关的功能
- 实现运动控制相关的功能
- 实现超声波传感器的功能
- 实现碰撞传感器的功能
- 实现自动回充相关的功能
- 实现Polling Command机制(底盘向SLAMWARE Core发送指令)
- 实现Event Notification机制(SLAMWARE Core通知底盘工作状态)
- 实现健康管理功能
基于自有固件集成
对于已经有自有底盘和固件体系的客户,也可以通过自己实现Control Bus Protocol的方式来集成SLAMWARE解决方案:
- 实现Control Bus协议
- 机器人配置
- 实现电源管理相关的功能
- 实现运动控制相关的功能
- 实现超声波传感器的功能
- 实现碰撞传感器的功能
- 实现自动回充相关的功能
- 实现Polling Command机制(底盘向SLAMWARE Core发送指令)
- 实现Event Notification机制(SLAMWARE Core通知底盘工作状态)
- 实现健康管理功能
软件集成
Windows
对于使用Windows的用户,我们提供了Windows 32bit的SDK。在Windows上进行集成,有如下的要求:
...
- 编译环境搭建
- 连接、连接管理与自动重连
- 本地数据缓存
- 地图和坐标显示
- 机器人运动控制
Linux
对于使用Linux的用户,我们支持如下几种不同的平台和编译器版本:
...
- 编译环境搭建
- 连接、连接管理与自动重连
- 本地数据缓存
- 地图坐标系定义
- 机器人运动控制
iOS
对于使用iOS的用户,我们提供了原生的Objective-C接口的SDK,集成步骤如下:
- 编译环境搭建
- 连接、连接管理与自动重连
- 本地数据缓存
- 地图坐标系定义
- 机器人运动控制
Android
对于使用Android的客户,我们提供了原生的Java接口的SDK,集成步骤如下:
...