...
| Info | ||
|---|---|---|
| ||
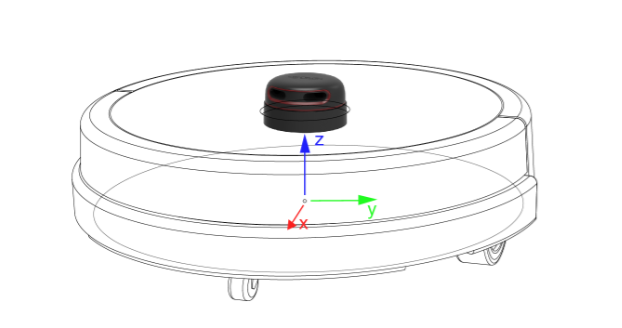
X轴方向为机器人前进方向,Z轴方向为垂直向上。X轴Y轴的零点为底盘的水平正中心, Z轴的零点为地面。角度坐标以X轴正向为0度,逆时针方向为正。 |
碰撞/超声/红外传感器设置
| Info | ||
|---|---|---|
| ||
在slamware configuration tool左侧的Sensors Tab下面,可以对碰撞/超声/红外传感器的位置和角度进行配置,参考坐标为上述机器人底盘参考坐标。 |

...
| Info | ||
|---|---|---|
| ||
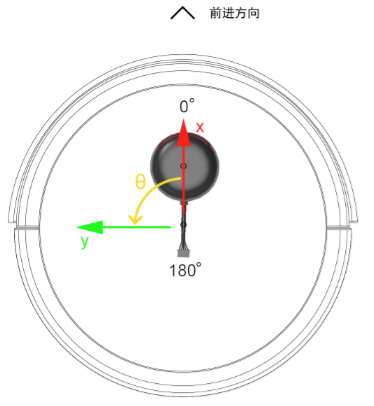
X轴方向为机器人前进方向,Z轴方向为垂直向上。X轴Y轴的零点为底盘的水平正中心, Z轴的零点为地面。角度坐标以X轴正向为0度,逆时针方向为正。 |
| Info | ||
|---|---|---|
| ||
在slamware configuration tool左侧的Sensors Tab下面,可以对碰撞/超声/红外传感器的位置和角度进行配置,参考坐标为上述机器人底盘参考坐标。 |