...
Slamware模块通过control bus和机器人底盘连接,机器人底盘需要将底盘的正确配置信息上传至Slamware模块,否则会导致定位导航行为异常。 与安装位置/方向相关的配置信息主要包括:(1)激光雷达的安装位置及方向; (2)Slamware模块的安装位置及方向;(3)碰撞传感器(2)Slamware模块的安装方向;(3)碰撞传感器/红外测距传感器/超声波传感器的位置, 上述配置会牵涉到底盘的参考坐标系,本文会详述此坐标系及不同组件的具体安装要求。除此之外,底盘配置工具slamware_config_tool还可以设置底盘大小,轮距,自动回充等其他参数,此工具具体用法将在下文中介绍。
...
| Info | ||
|---|---|---|
| ||
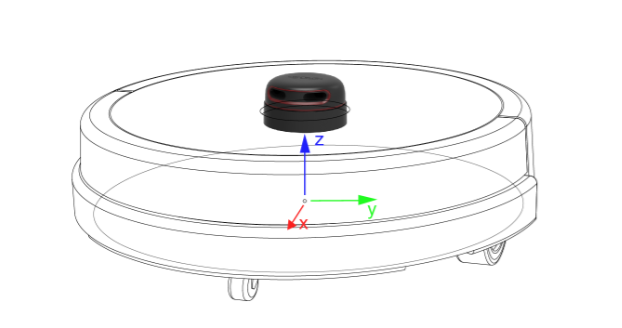
X轴方向为机器人前进方向,Z轴方向为垂直向上。X轴Y轴的零点为底盘的水平正中心, Z轴的零点为地面。 |