本文档介绍了关于雷达到货/返修之前用户可以进行的初步检测流程。
用户须知
用户在使用过程中可能会遇到因为操作流程失误造成雷达失效的误判,请用户按照以下文档中的说明,进行自检之后,再将确认的问题以及雷达序列号发给我方支持邮箱 support@slamtec.com,以便减少雷达返修的沟通成本。
ROS系统的用户,也请按照此文档的说明,在windows系统下排查雷达的问题。
所需工具
请安装官方版本robostudio工具进行排查操作,请确保使用的是最新版的Robostudio工具,SDK中自带的framgrabber程序不宜作为排查工具。
套装完整性检查
完整的激光雷达套装包括:
- A1雷达:激光雷达,转接板,排线
- A2雷达:激光雷达,usb串口转接板,USB线,电源适配器
- A3雷达:激光雷达,USb串口转接板,USB线,电源适配器
请在返修雷达的同时将完整的配件寄回。
外观检查
1) 目检激光雷达外壳是否有明显裂痕。
2) 目检激光雷达串口线尾端是否有被拔出或者断裂痕迹。
注意
如有断裂请可能会影响雷达连接,请按照后续功能检查中的项目确认设备连接问题。
正常线如下图所示:

3)目检激光雷达底部防拆贴是否完整(底部一共两个,下图中R标志白底防拆贴)
注意
如有任何防拆贴损坏,均视为用户私拆雷达行为不享受任何保修服务 。

功能检查
1)测试雷达功能之前,请确保使用雷达原装附件板以及USB连接线,用户自用转接板以及USB线,无法保证和验证激光雷达的功能。

2)将激光雷达接上转接板以及USB线,A3雷达的附件板有两档波特率开关,A3雷达需选择256000档,A2雷达则需选择115200,A1雷达直接连接附带的排线以及转接板即可。

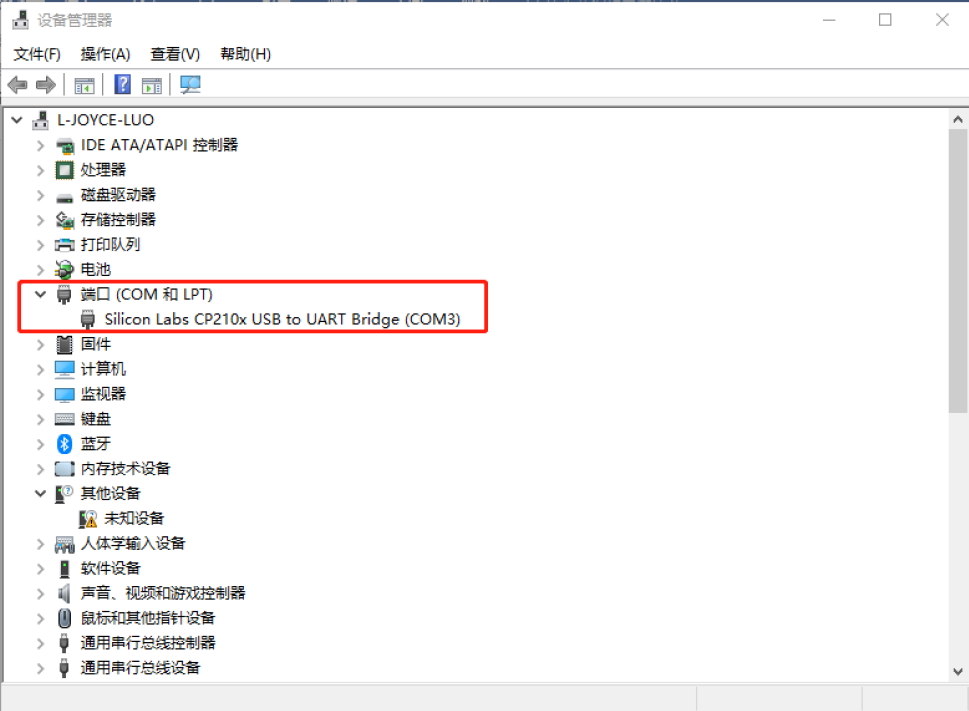
3)将 USB 线另一端接入电脑(windows系统)USB口,检查设备管理器端口中是否有识别到雷达设备,如下图。
注意
- 如果无法识别串口,请尝试重新安装SDK中的CP2102驱动。
- 如安装驱动后仍无法识别串口,请换台电脑尝试。
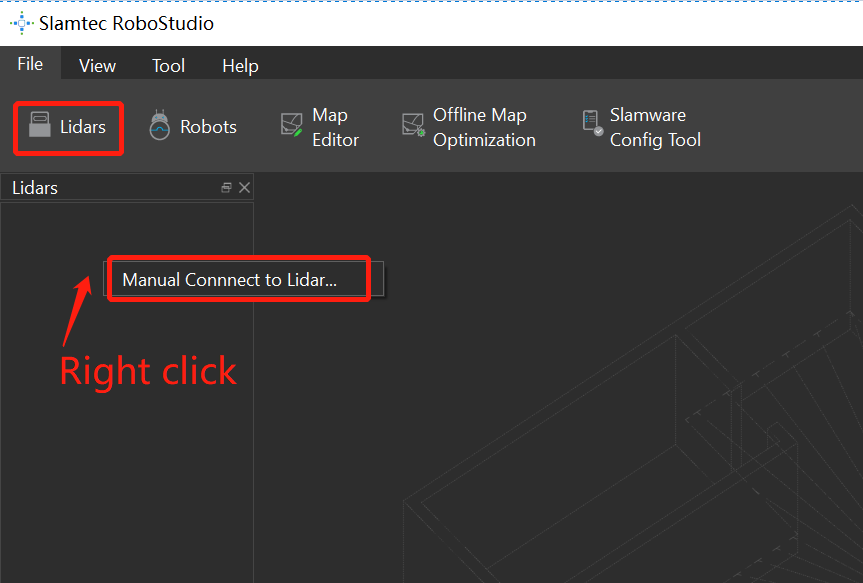
4)打开 Robostudio软件,注册登录后单击雷达插件部分,右键单击左侧窗口的空白部分,连接雷达,会弹出已识别的连接雷达的串口(默认是COM3),点击连接。查看是否能够正常显示出雷达测距界面。
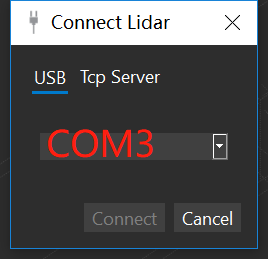
注意
如果无法显示测距界面并弹出error,请将error截图,并将雷达底部序列号二维码拍照,发至support@slamtec.com
5)连接好雷达后点击绿色三角按钮开始扫描,雷达开始旋转并输出激光点。如下图所示:
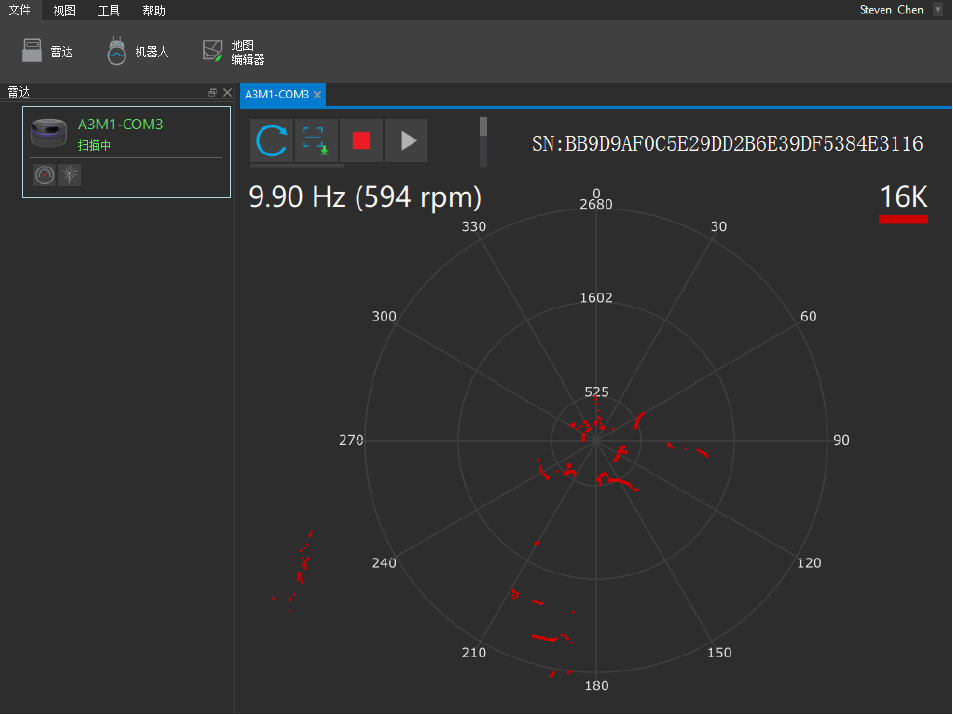
注意
如果雷达正常旋转,但无激光点输出,请将雷达底部序列号二维码拍照,发至support@slamtec.com
6)检查雷达转动时是否有明显机械异响声,如有异响可能为在用户处撞击或摔过导致 。