在用户下发运动指令到机器人底盘后,slamware首先会根据地图和目标点的情况进行路径规划,规划好后底盘才会根据规划出的路径产生相应的运动,有的用户需要获得路径规划是否成功的状态,这里对获取方式进行介绍。
测试代码:TestCode.java
在Android SDK中,与底盘运动相关的moveTo、moveBy、rotate、rotateTo、goHome、startSweep、sweepSpot、recoverLocalization等方法都会返回一个IMoveAction类(或其子类)的对象,该对象中记录了此次运动相关的信息,这里通过action.getRemainingPath().getPoints().isEmpty()判断剩下的路径中路径点是否为空来间接判断路径规划是否成功。
try {
IMoveAction action;
MoveOption moveOption = new MoveOption();
moveOption.setPrecise(true);
moveOption.setMilestone(true);
Log.d(TAG, "==============================================");
Log.d(TAG, "Move To");
action = robotPlatform.moveTo(new Location(1, -3, 0), moveOption, 0);
while(action.getRemainingPath().getPoints().isEmpty()) {
Log.d(TAG, "remaining path is null");
sleep(1);
}
Log.d(TAG, "create path successful ...");
Vector<Location> vactor = action.getRemainingPath().getPoints();
Log.d(TAG, "vactor.size() = " + vactor.size());
Log.d(TAG, "vactor.isEmpty() = " + vactor.isEmpty());
Log.d(TAG, "==============================================");
action.waitUntilDone();
if (action.getStatus() == ActionStatus.ERROR) {
Log.d(TAG, "Action Failed: " + action.getReason());
}
} catch (ConnectionTimeOutException e) {
/* Exception Handle code*/
...
}
测试现象
在底盘周围放置障碍物,使其无法规划出一条能够到达目标点的路径,地图、障碍物、目标点的情况见下图

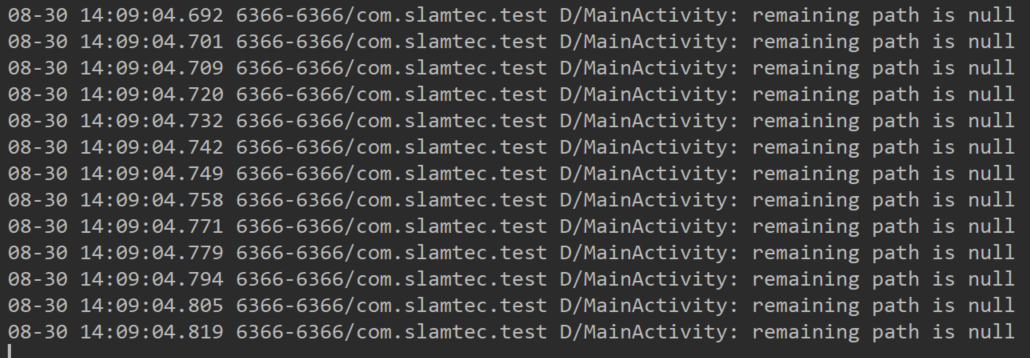
运行程序Logcat输出如下,底盘无法规划出路径,也不会运动
撤除底盘旁边的障碍物,再次运行测试程序,底盘在间隔一段时间后规划出路径,并沿着路径中的7个点逐点导航到目标点
Logcat输出如下,可以看到slamware在几毫秒后规划出路径,路径中共有7个点
