Catalogue
1 Cannot connect to Lidar
1.1 Cannot connect to Lidar with serial port attached board in RS
1.2 Cannot connect to Lidar with ethernet port attached board in RS
1.3 Cannot connect to S2E in RS
2 Without data after connecting to Lidar
2.1 The S2 is short of power supply and the motor is not running
2.2 The motor of Lidar is damaged
2.3 Launch under Linux system
3 Noise occurs during Lidar's operation
3.1 Noise of A series Lidars
3.2 Noise of S series Lidars
4 Usage of serial port tool
4.1 The serial port tool cannot be started or stopped to collect Lidar data
5 S2
5.1 The ethernet port attached board of S2 cannot run in ROS
6 SDK
6.1 SDK compile error
7 FAQ
7.1 If the Lidars will be damaged when three S2 placed face to face are started
Cannot connect to Lidar
Cannot connect to Lidar with serial port attached board in RS
- Check if the serial port driver is installed on the device manager.
You can find the compressed driver file in the \rplidar_sdk\tools\cp2102_driver directory. After decompressing the compressed driver file, select the installation file based on your operating system: For 64-bit oss, use the CP210xVCPInstaller_x64 file to install the driver. For 32-bit oss, use the CP210xVCPInstaller_x86 file to install the driver.
- Check whether the serial port adapter is used correctly, and replace the serial port adapter to test.
the black cover without dip switch:S2:1000000
no dip switch without cover 115200:A1M8
the black cover with dip switch 115200:A2M8、A2M6
the black cover with dip switch 256000:A2M7、A2M12、A3、S1
Note: A few years ago, the serial port converter board had no dip switch and the baud rate was 115200.
- Replace the USB port. The power supply of the USB port may be insufficient. Connect the USB power cable and Micro-usb at the same time. You can also use the 5V 2A mobile phone charger to power separately, and you can also verify the problem of insufficient USB power supply.
- Check if other serial port tools are connected to the lidar at the same time. The lidar cannot be opened by two serial port tools at the same time.
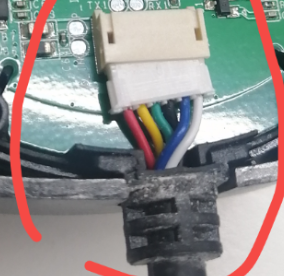
- Check if the lidar serial cable is in good contact. You can open the bottom cover to check if the serial cable falls off.
- If the above is normal, the serial port of the lidar circuit board may be broken, and it needs to be returned to the factory for maintenance.
Cannot connect to Lidar with ethernet port attached board in RS
- Check if the IP address of the network port attachment board can be pinged. If the IP address of the local port cannot be pinged, check if the IP address of the local port is in the same network segment. Check whether the network port attachment board is used incorrectly.
ethernet port attached board 115200:A2M8、A2M6
ethernet port attached board 256000:A2M7、A2M12、A3、S1
Note: Different boards can be brushed with the corresponding firmware versions to achieve common purposes.
Ethernet port attached board of A series:
Ethernet port attached board of S2:
- If the preceding information is normal, the network port conversion board may be faulty. You can replace the network port conversion board or use the serial port conversion board to verify the lidar's condition.
Cannot connect to S2E in RS
- Check if the power supply is between 9V and 28V. Generally, 12V is used.
- Check if the IP address of the network port attachment board can be pinged. If the IP address of the local port cannot be pinged, check if the IP address of the local port is in the same network segment.
Without data after connecting to Lidar
The S2 is short of power supply and the motor is not running
1、Check if the USB power cable is properly connected to the USB communication cable. Check if the USB port is normal. Replace the USB port.
2、Check if the USB power supply is stable. Do not use the USB dock for power supply because the quality of the USB dock cannot be guaranteed.
3、Directly connect the two USB devices of the lidar to the computer at the same time (within 3 seconds), and check whether the data is normal using the official website studio. Ensure that both USB sticks (within 3 seconds) are plugged in and removed at the same time.
4、Use a 5V 2A cell phone charger to power the lidar separately. Use the official website RS to check whether the data is normal. Ensure that both USB sticks (within 3 seconds) are plugged in and removed at the same time.
The motor of Lidar is damaged
1、The motor of A1 does not run, unplug the power cord of the motor, use a multimeter to measure the resistance value of the motor, generally several ohms, if large, that is, the motor is bad, need to replace the motor.
2、The motor of A2, A3 does not run, the three-phase coil on the circuit board is measured. It is generally several ohms. If many coils are bad, they need to be replaced.
3、The motor of S2 does not turn, measure the three-phase coil on the circuit board, generally several ohms, if a lot of that coil is bad, need to be replaced.
Launch under Linux system
1、Check if USB is authorized under Linux system.
Check if the USB is authorized. (If the VM needs to restart the serial port attachment board, select Connect to the VM.):ls -l /dev |grep ttyUSB
Authorized USB :sudo chmod 666 /dev/ttyUSB0
2、Download and compile the SDK from the official website. There is still no data to check if the local ROS installation is successful. Use the small turtle to check if the installation is successful.
3、Re-download and compile the ROS feature pack.
Noise occurs during Lidar's operation
Noise of A series Lidars
- Check if the shell is damaged. Is there noise when sloshing lidar? If there is noise, it needs to be returned to the factory for maintenance.
Noise of S series Lidars
- Check if the shell is damaged. Is there noise when sloshing lidar? If there is noise, it needs to be returned to the factory for maintenance.
2、Check if the noise is caused by the resonance between chassis and lidar, you can remove the lidar's USB power supply and USB communication cable, shut down other devices, and use the laptop to start the radar separately to check if the sound is normal.
Usage of serial port tool
The serial port tool cannot be started or stopped to collect Lidar data
1、Configure sscom according to the following figure. And close the robot studio. Only one tool can open the lidar serial port. If your A1 is powered on with rotation, but A1 stops rotating after you turn on the serial port tool, please directly change the check status of DTR.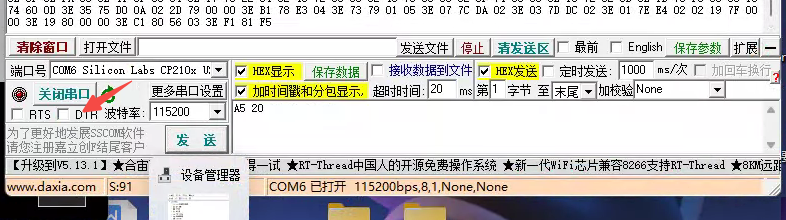
2、Start running lidar:A5 F0 02 58 02 0D(The lidar of a few years ago needed to rotate first)
3、Start collecting data:A5 20(The new version of the lidar is activated directly)
4、Stop running lidar:A5 F0 02 00 00 57
5、Stop collecting data:A5 25
S2
The ethernet port attached board of S2 cannot run in ROS
1、The customer's network port conversion module is incorrectly used. The A series network port conversion module is on the left, and the S2 network port module is on the right.
SDK
SDK compile error
Currently, SDK compilation only supports VS2010 and VS2019. Some computers need to close the firewall and anti-virus software before normal compilation.
FAQ
If the Lidars will be damaged when three S2 placed face to face are started
No, it's a little disturbing. It doesn't affect use.