附件下载
链接: https://pan.baidu.com/s/1sJn9BTAyEqMLxU8daHJvxg 密码: nuwk
注意事项
本文档内容不支持RPLiDAR A1系列雷达,SDK仅支持VS 2010版本。
操作步骤
- 打开demo_TUIO\multitouch_server\multitouch_Server\workspaces\vc10目录下的multi_touch_server.sin
然后Rebuild resolution. 在当前文件目录下的…\sdk_project\multiTouch_sdk\Debug\output下,,拷贝multiTouch_sdk.dll文件至…\vc10\calibration_project\bin以及…\server_project\bin目录下.
注意
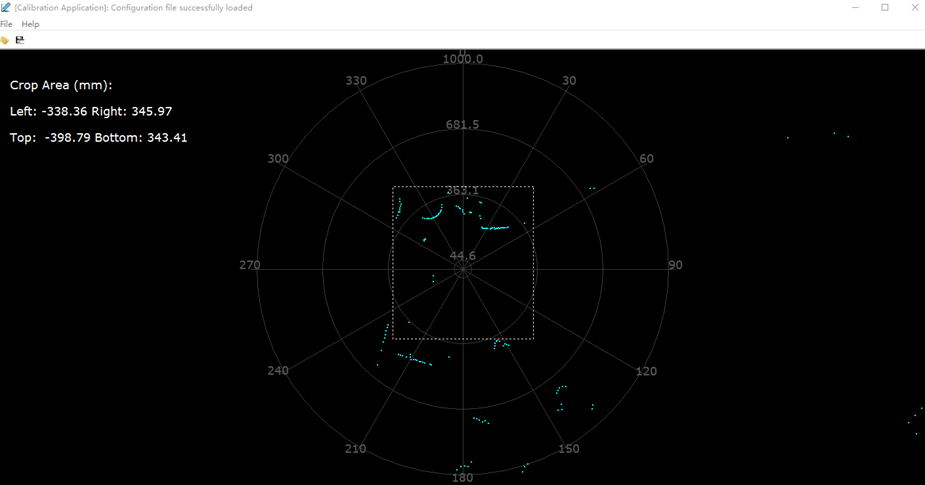
实际给出的压缩包中已经编译过并且拷贝过dll到对应目录中。如对multiTouch SDK有任何修改后,才需要进行以上操作。- 此时连接好RPLiDAR,运行编译好的…\vc10\calibration_project\bin下的calibration_app.exe。
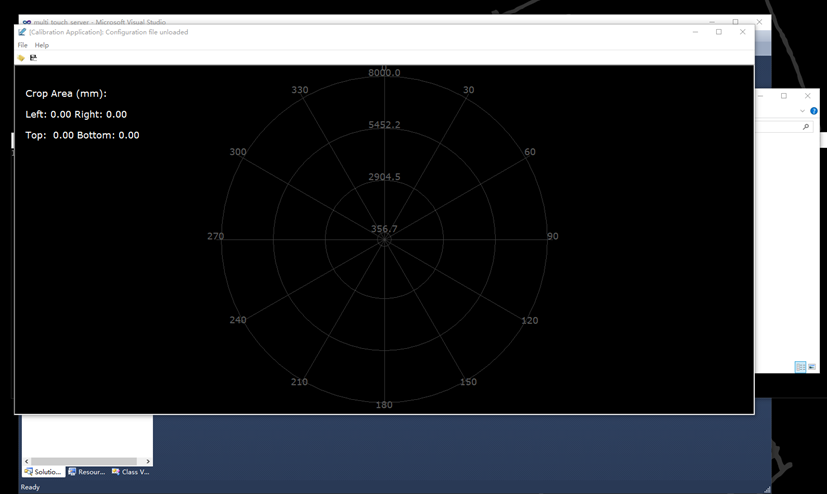
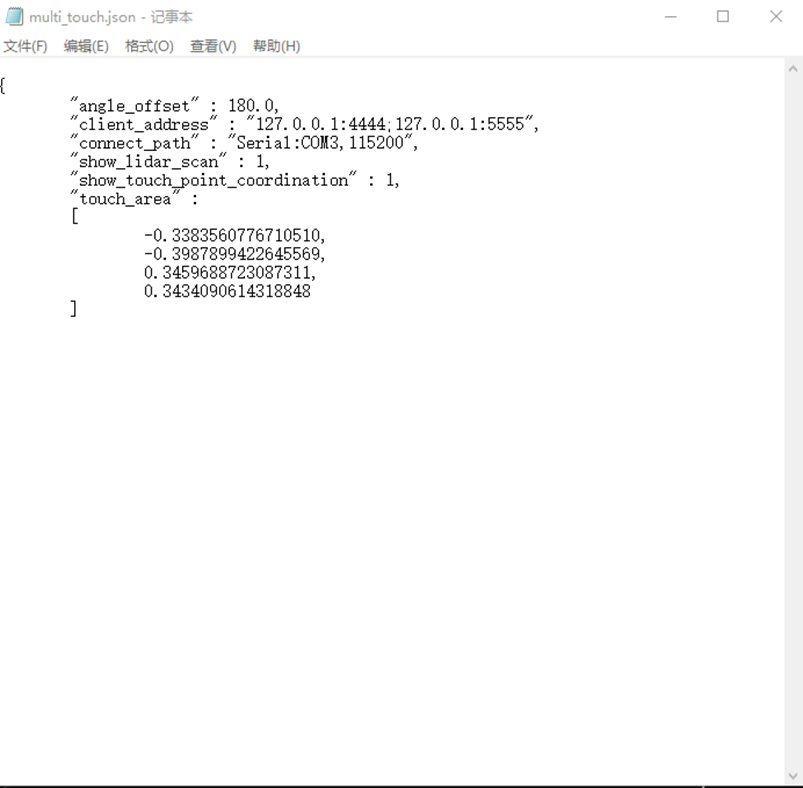
- 点击左上角的load configuration,配置文件是…\vc10\server_project目录下的multi_touch.json。其中配置了client端的ip地址端口,也可以手动修改Touch area的大小,其他参数不建议修改。
- 加载了配置文件后雷达会开始转动并扫描,calibration_app中也出现了雷达扫描点。通过拖动白色虚线框来调整需要的Touch Area大小及位置。
- 调整完毕后点击左上角的save configuration保存配置文件,然后可以关闭calibration_app。打开client_4444文件目录下的TuioDemo.exe,客户端采用一个console加显示界面的方式,待开启server后,console中会不断打印client端addBlob和removeBlob的操作以及其他客户端操作,显示界面中会显示此时的Blob。
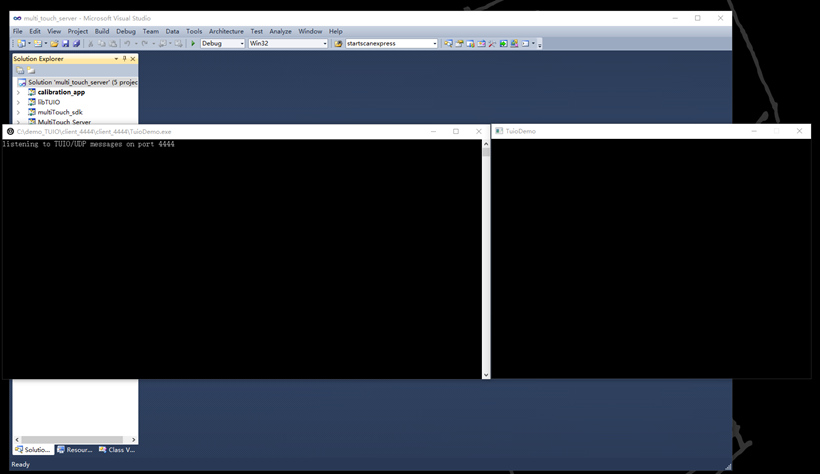
(图中启动了client_4444即配置文件中端口为4444的客户端。) - 然后启动server,打开…\vc10\server_project\bin下的MultiTouch_Server.exe. 此时在client和server的console中会不断打印add和remove blob操作,显示界面中出现触摸点。
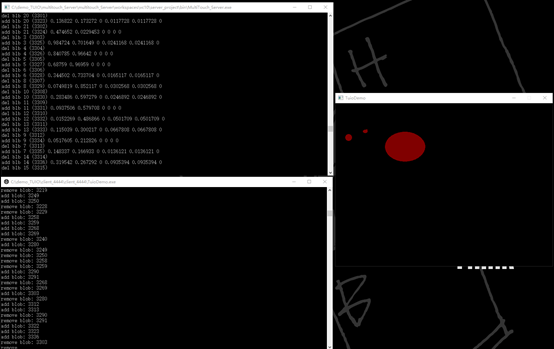
(也可以观看压缩包中demo_TUIO.MOV查看运行效果)