...
底盘返回机器人GET_BASE_STATUS的命令为已经在充电桩上,此时,获取goHome()这个action的status应该为finished状态。
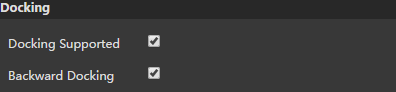
机器人能不能倒着进入充电桩充电?
可以,在Slamware底盘配置工具里面Docking选项卡下面勾选Backward Docking
...
底盘返回机器人GET_BASE_STATUS的命令为已经在充电桩上,此时,获取goHome()这个action的status应该为finished状态。
可以,在Slamware底盘配置工具里面Docking选项卡下面勾选Backward Docking