| Excerpt |
|---|
本页介绍了get_power_status的用法, 包含当前的充电状态,电池电量等。 |
本页内容
| Table of Contents |
|---|
运行环境准备
软件平台
- Visual Studio 2010 SP1
- Slamware Windows SDK:Slamware Windows SDK
- RoboStudio(用于显示地图):Robostudio installer
Sample Code:
Info 使用更高版本的Visual Studio可能会带来编译异常。
使用Visual Studio 2010(无SP1)可能会因为无法与.Net Framework兼容而报编译错误,此时增加SP1更新包即可解决问题
硬件平台
(以下任选其一)
- Slamware SDP mini
- Slamware SDP
- Slamware 套装 (基于Slamware导航方案的用户机器人系统)
- Zeus/Apollo等底盘系统
编译运行
- 打开samples工程,右键get_power_status, 将此工程设置成StartUp project

右键get_power_status, 打开属性选项,将Slamware SDK 的include目录和lib目录添加到工程
Info Slamware SDK的include和lib目录无需复制到参考例程目录,只需在Visual Studio里指定路径即可。

- 右键get_power_status, 在Debugging页面中command Arguments处输入 192.168.11.1
格式说明:get_power_status <IP address>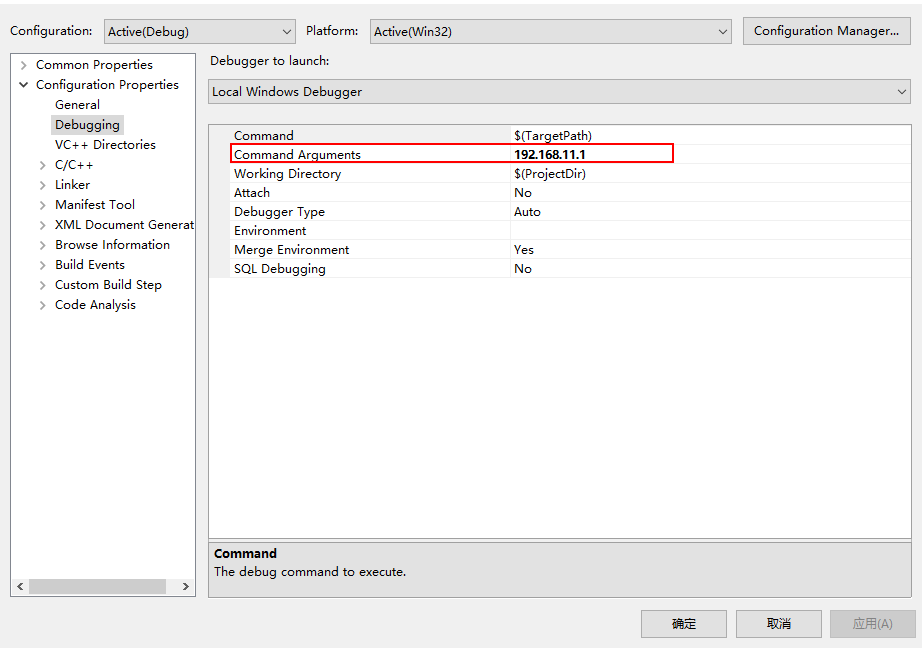
- 点击F5运行
- Console输出为

代码描述
获取电量/充电状态
Code Block language cpp firstline 1 title 获取电量/充电状态 linenumbers true SlamwareCorePlatform sdp = SlamwareCorePlatform::connect(argv[1], 1445); std::cout <<"SDK Version: " << sdp.getSDKVersion() << std::endl; std::cout <<"SDP Version: " << sdp.getSDPVersion() << std::endl; PowerStatus status = sdp.getPowerStatus(); std::cout << "Battery Percentage: " << status.batteryPercentage << std::endl; std::cout << "is Charging: " << status.isCharging << std::endl; std::cout << "is DC connected: " << status.isDCConnected << std::endl; if(status.dockingStatus == DockingStatusNotOnDock) std::cout << "Docking status: Not on dock" << std::endl; else if(status.dockingStatus == DockingStatusOnDock) std::cout << "Docking status: On dock" << std::endl; else std::cout << "Docking status: Unknown" << std::endl;