本页内容
| Table of Contents | ||||
|---|---|---|---|---|
|
概述
SLAMWARE模块通过control bus和机器人底盘连接,机器人底盘需要将底盘的正确配置信息上传至SLAMWARE模块,否则会导致定位导航行为异常。 与安装位置/方向相关的配置信息主要包括:
(1)激光雷达的安装位置及方向;
(2)SLAMWARE模块的安装方向;
(3)碰撞传感器/红外测距传感器/超声波传感器的位置;
上述配置会牵涉到底盘的参考坐标系,本文会详述此坐标系及不同组件的具体安装要求。除此之外,底盘配置工具slamware_config_tool还可以设置底盘大小,轮距,自动回充等其他参数,此工具具体用法将在下文中介绍。
软件准备
配置工具作为默认插件集成在Robostudio软件中,所以需要用户在配置之前下载安装robostudio软件。请点击这里进入安装包以及手册的下载界面。
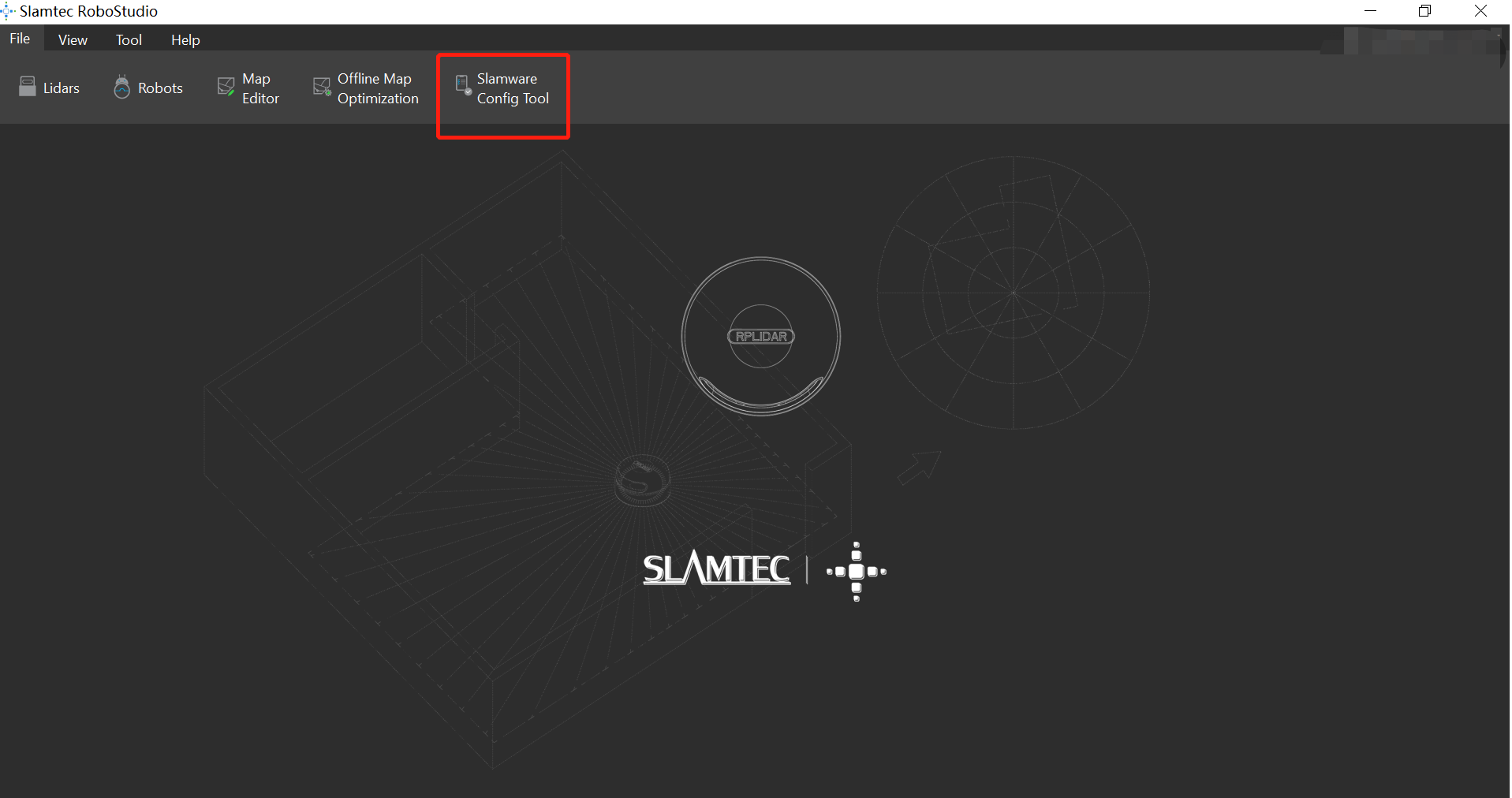
启动Robostudio后,配置工具可以在如下图所示位置找到。
| Info | ||
|---|---|---|
| ||
在首次安装的时候需要将电脑连接网络,否则可能导致插件安装失败。 |
机器人底盘参考坐标系
X轴方向为机器人前进方向,Z轴方向为垂直向上。X轴Y轴的零点为底盘的水平正中心, Z轴的零点为地面。角度坐标以X轴正向为0度,逆时针方向为正。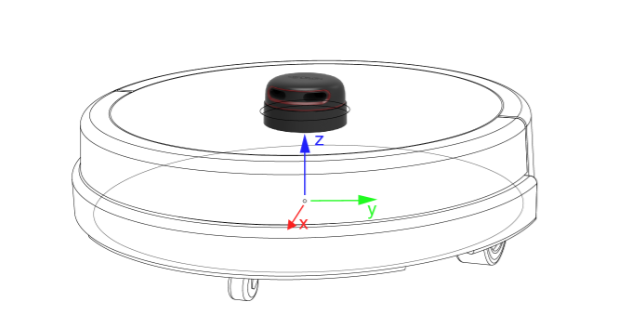
机器人基本设置(Robot界面)
在左侧的Robot 界面中,可以进行机器人基本参数的配置,包含Robot, Slamware Core Pose 以及Dimension三部分,其中Robot部分内容与机器人行为无关,可以不做配置,保留默认即可。
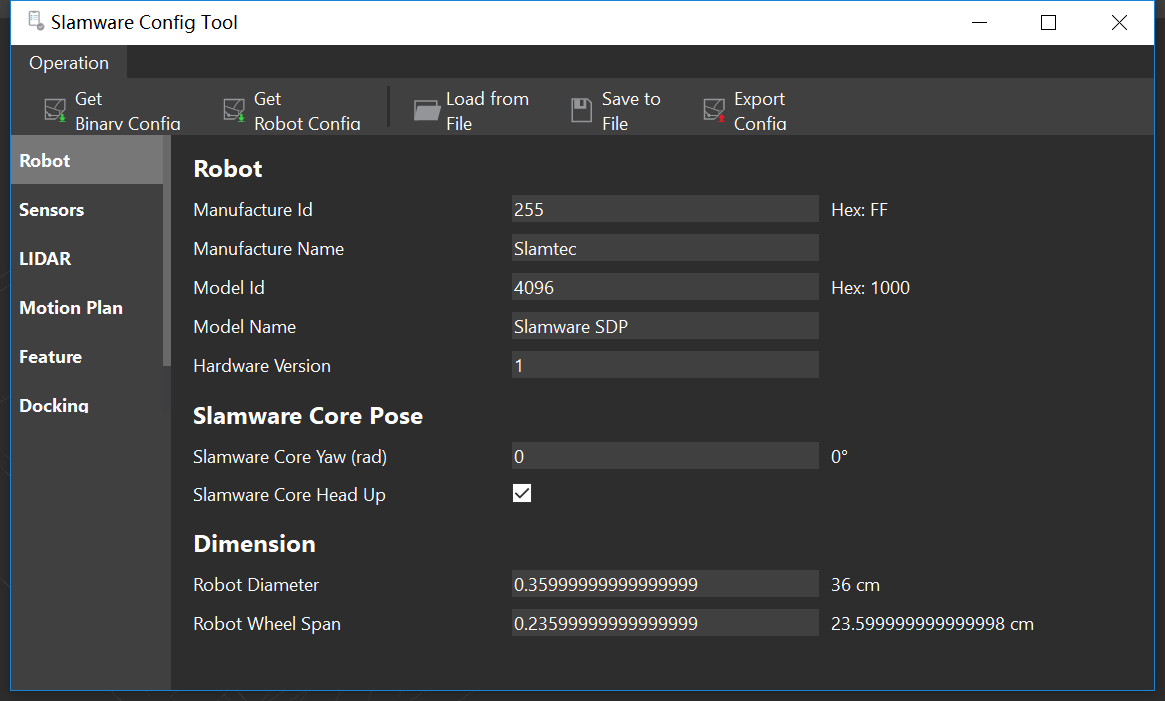
Slamware Core Pose设置
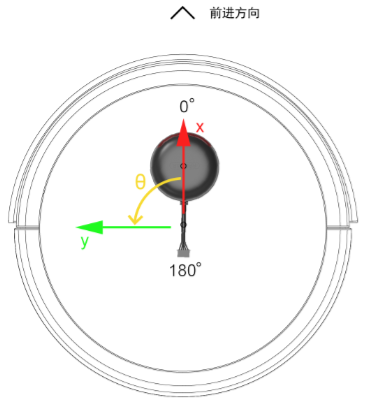
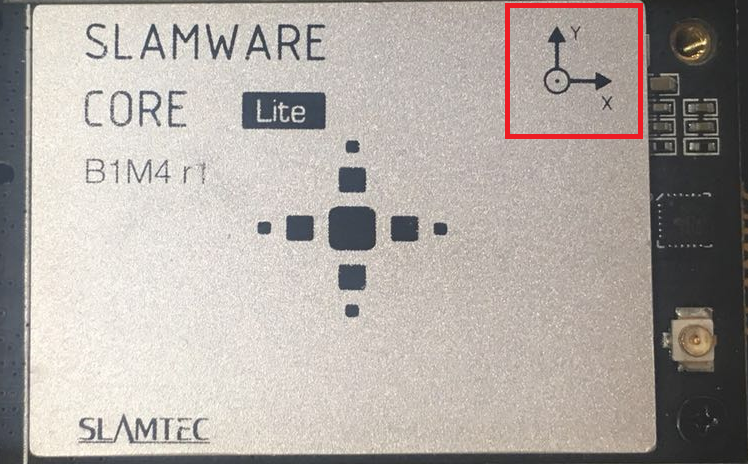
在Slamware configuration Tool左侧的Robot页面中,可以对Slamware模块的参数进行配置,其中Yaw角度为Slamware Core模块本身的安装角度,为下图模块X方向和底盘参考坐标X方向之间的逆时针夹角 。Slamware Core模块如果需要倒置安装(朝下),请不要勾选Slamware Core Head Up。注意,模块必须水平放置。
Dimension 设置
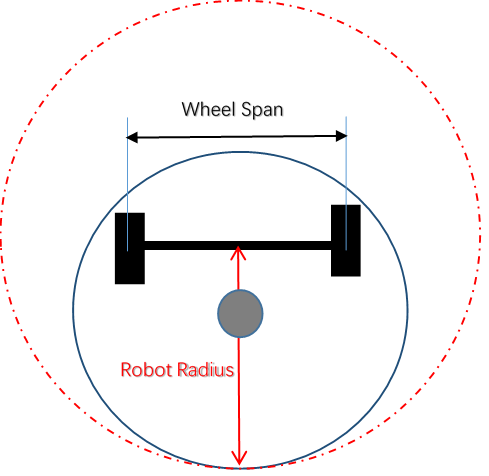
底盘的直径Robot Diameter, 需要设置成底盘外接圆的直径。 这个值是用来过滤激光雷达在底盘尺寸内扫描到的障碍点,防止底盘上的物体被当成障碍点造成导航不正常。 轮距Robot Wheel Span是机器人底盘轮子的外接圆直径(包括两轮和三轮全向轮),轮胎厚度的中心开始测量。
碰撞/超声/红外传感器设置(Sensors 界面)
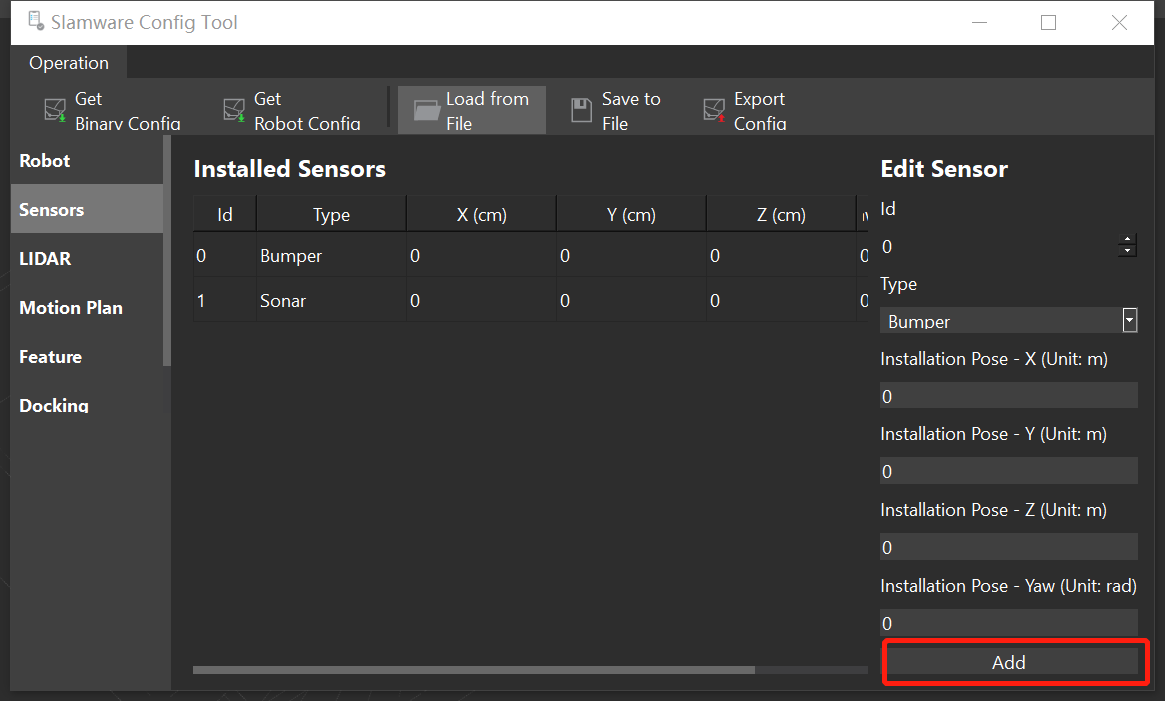
在slamware configuration tool左侧的Sensors页面中,可以通过界面右侧的Add按钮添加自定义类型以及数量的传感器。碰撞/超声/红外传感器的位置和角度也在这个页面进行配置,参考坐标为上述机器人底盘参考坐标。
| Info | ||
|---|---|---|
| ||
ID 不能重复定义,即使传感器的类型是不同的,ID也不可以定义重复。 |
激光雷达设置(LIDAR界面)
安装位姿
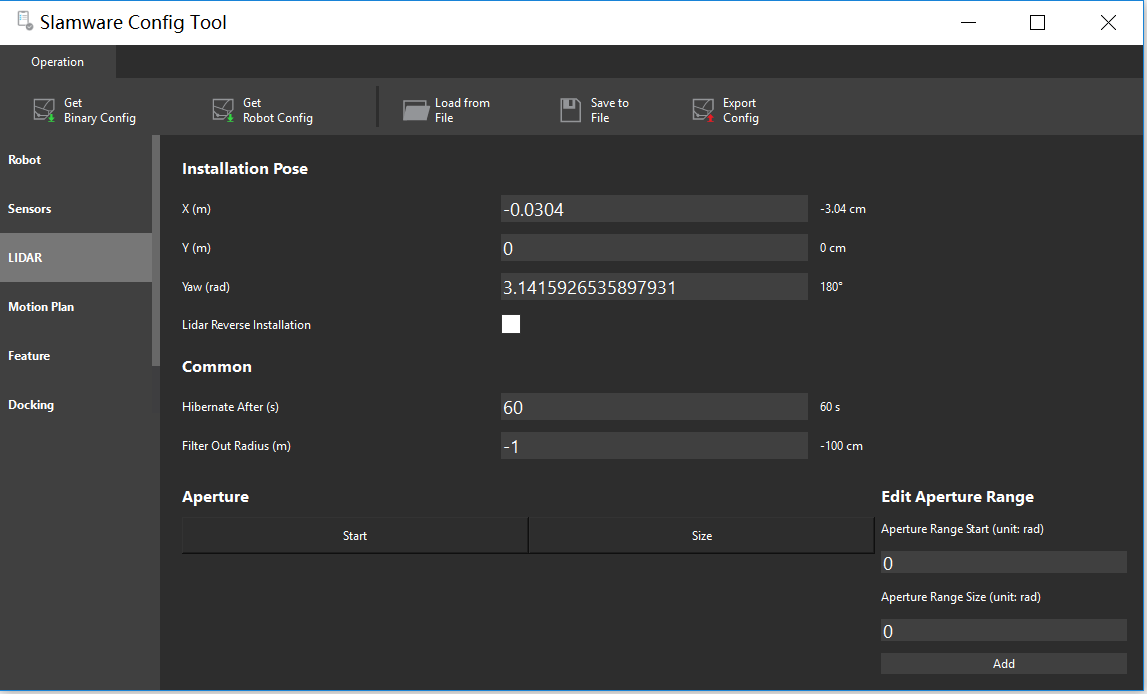
在Slamware configuration Tool左侧的LIDAR页面中,可以对激光雷达的参数进行配置,其中Yaw角度为激光雷达本身的安装角度,如上图中雷达的位置,X轴方向为雷达本身的零度方向(雷达连线方向的反向), yaw值为雷达零度方向和机器人底盘X轴方向的逆时针角度(截图中的yaw对应的即是小图中的安装位置)。
激光雷达如果需要倒置安装(朝下),请勾选Lidar Rerverse Installation。
常用设置
- Hibernate After: 雷达休眠时间,默认值为60s,其含义是系统在没有收到运动指令60s后自动休眠,如果想要雷达不休眠,可以将此参数设置为0.
- Filter Out Radius:该参数可以设置一个以机器人坐标系原点为圆心的半径为该参数的一个圆形区域,该区域内雷达探测的障碍物点会被过滤掉。该值最小值为机器人尺寸半径。
雷达开口设置
机器人在雷达扫面高度处需要在机器人外壳预留出开口,以便雷达激光扫描外部障碍物,考虑到机器人外壳的支撑,开口的值建议最少需要220°(可连续可不连续)。若由于机械结构的设计原因,开口并不连续,则可以将多个开口添加到配置中进去。
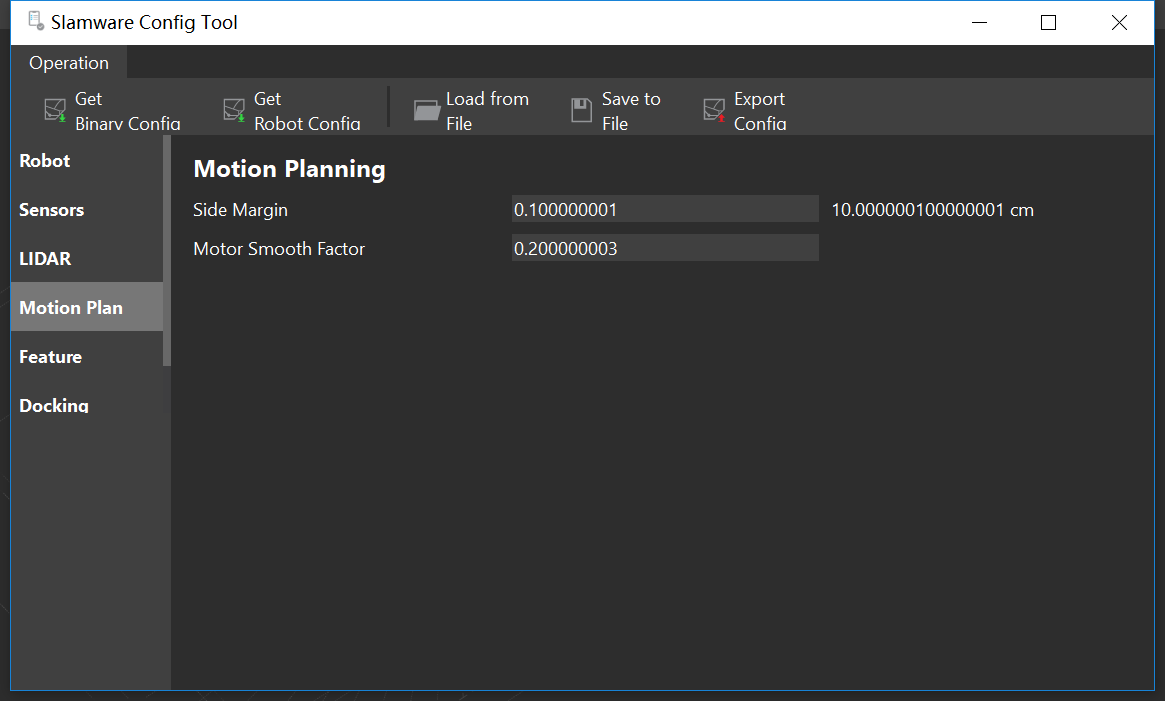
运动规划(Motion Planning界面)
在Motion Plan 页面中,可以对slamware进行避障相关的设置。
- 留边 Side Margin :由于机器人外形不均匀的缘故,避障范围可能不仅限于底盘的范围,side margin用来调节避障范围的大小。避障范围为Robot diameter + 2* side margin直径大小的圆周。
- 电机平滑因子 Motor Smooth Factor:暂时用不到,建议保留默认。
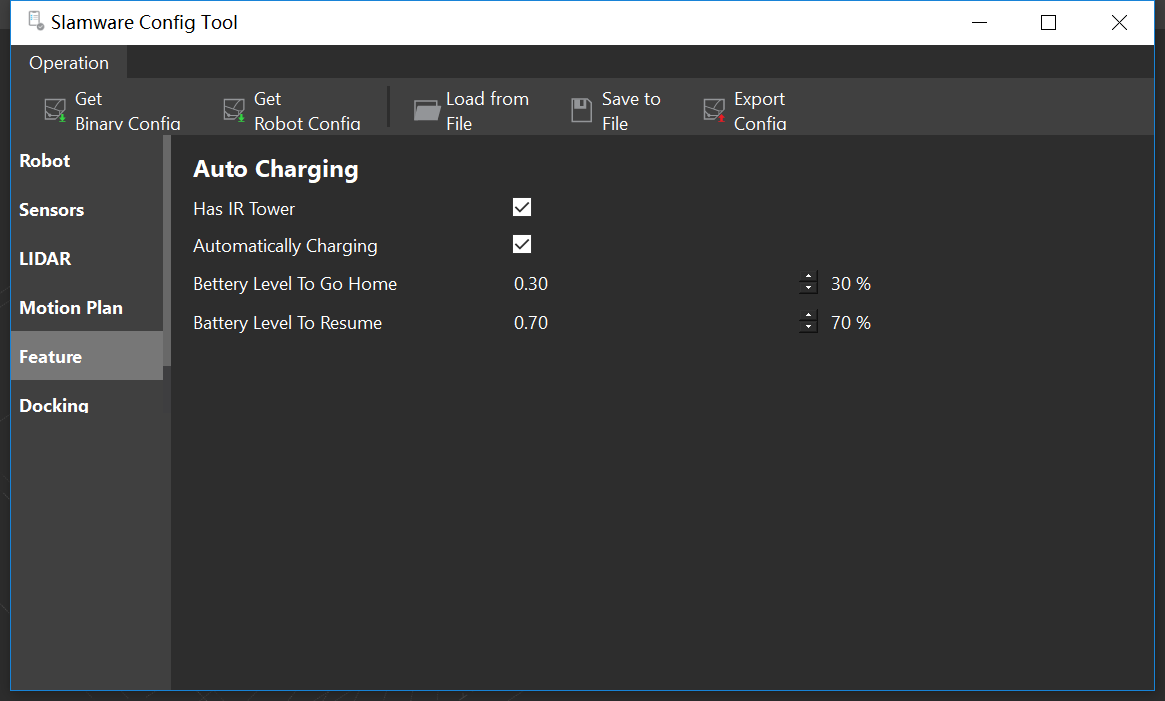
特征(Feature 界面)
在此页面用户可以配置红外充电相关选项。与运动以及避障无关,可以保留默认设置。如果对以下参数有疑问,请联系思岚技术支持。
充电桩(Docking 界面)
在此页面用户可以配置充电方向等设置。
- 是否支持对桩 Docking Support :如果机器人支持充电桩充电则需勾选。
- 后向对桩 Backward Docking:在回充过程中,机器人的移动方向如果相对于机器人坐标系向后移动,则需勾选此项。
- 对桩方法 Docking Method: 对桩方法分为“激光回充”与“红外回充”两种,详情请参见SA007 KBSW180149 基于Slamware解决方案的充电方案参考设计
- 着陆偏移 Landing Offset:机器人在回桩过程中,会首先自动移动到充电桩正前方向上的某点,机器人会在此处旋转寻找充电桩并在识别充电桩之后进行对桩,这样可以避免从其他角度对桩造成对桩失败。而本参数指的即是该点与充电桩的距离。
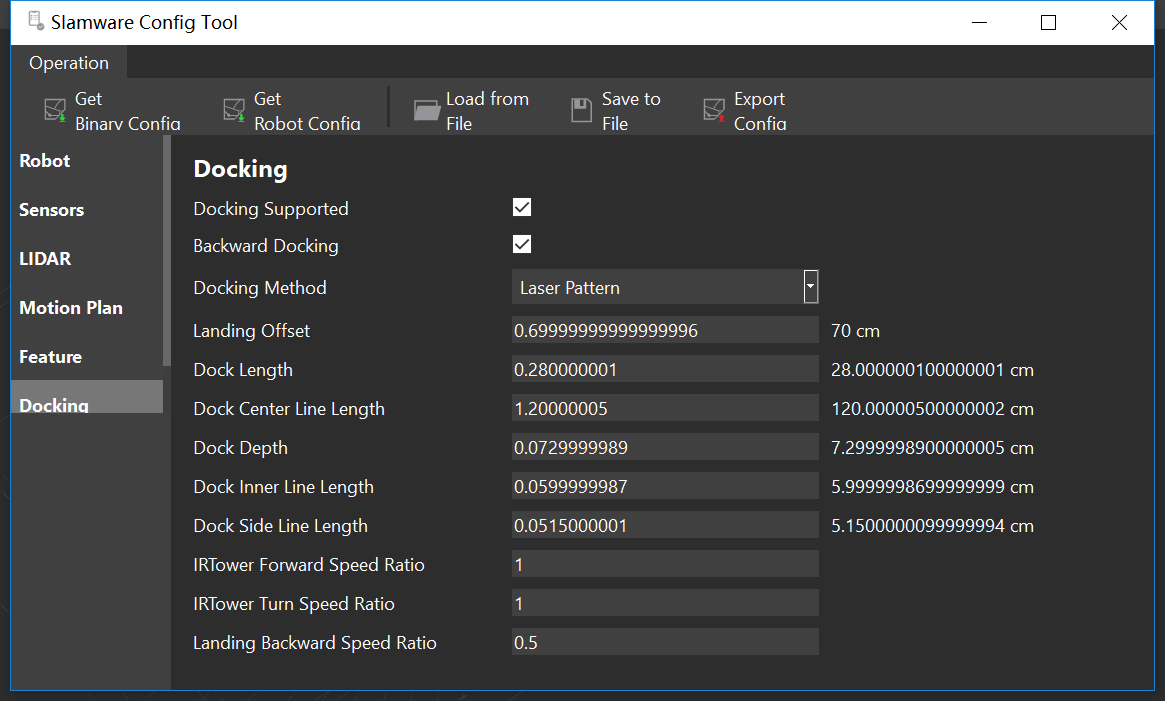
- 充电桩长度 Dock Length: 此参数暂时用不到,建议保留默认。
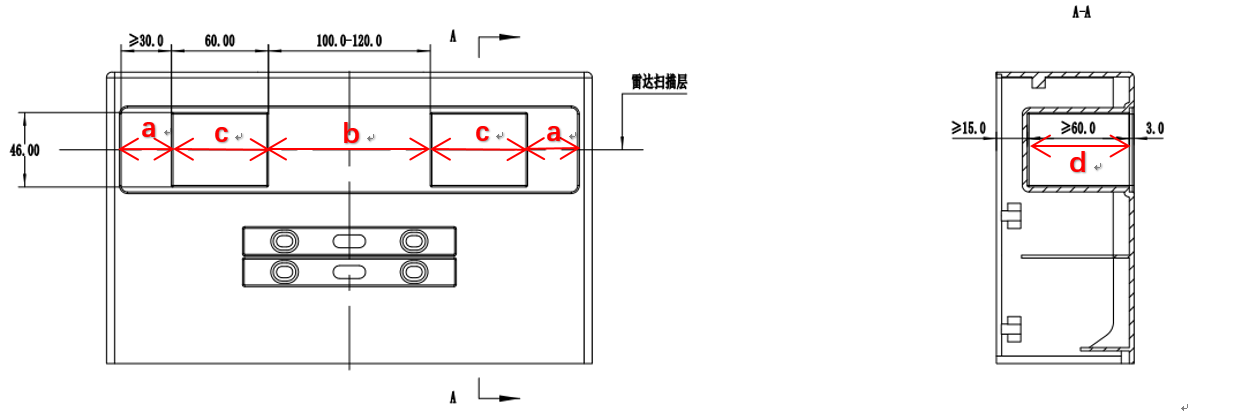
- 充电桩中央线长度 Dock Center Line Length:详见下图b
- 充电桩宽度 Dock Depth:详见下图d
- 充电桩内线长度 Dock Inner Line Length:详见下图c
- 充电桩边线长度 Dock Side Line Length:详见下图a
- 红外塔前向速率比率 IRTower Forward Speed Ratio: 此参数暂时用不到,建议保留默认。
- 红外塔旋转速率比率 IRTower Turn Speed Ratio:此参数暂时用不到,建议保留默认。
- 着路后向速率比率 Landing Backward Speed Ratio: 在回桩后退过程中相对于机器人正常运动速度的比率。
配置文件保存
全部参数配置好之后,在配置工具页面上部,用户可以对配置进行load, save 以及Export 操作。
- Load from File:用户可以加载保存好的slconf文件。
- Save to File:用户可以保存配置到slconf文件。
- Export: 用户可以将配置导出为c文件,通过替换工程文件中对应配置文件的方式,可以将新配置更新到工程中。例如,如果使用的是SLAMTEC提供的关于SDPmini的参考代码,可以通过替换sdp_mini.c的方式更新配置文件。
- Get Binary Config: 获取当前所连接机器人的静态配置信息。
- Get Robot Config:获取当前所连接机器人的动态配置信息。
