...
常用的机器人底盘电机编码器按实现原理来分类,包括光电编码器及霍尔编码器,按照其编码方式分类,主要包括增量型和绝对型。对于基于slamware的机器人底盘来说,里程计的分辨率需要在1mm以下,且总误差最多不能超过5%,如果超过此数值,机器人将无法正常实现定位导航的功能。因此,无论选择哪种编码器,必须要达到其精度的要求。可以参考以下判断公式:

系统电机应答流程
| Info | ||
|---|---|---|
| ||
仅以两轮差动电机为例,三轮全向电机请参考仅以两轮差动电机为例,三轮全向轮电机请参考Slamware解决方案与三全向轮底盘集成指 |
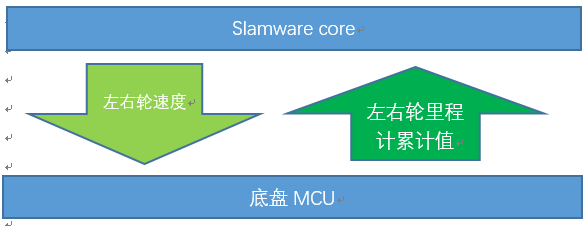
Slamware core 每间隔delta时间,会向底盘发送左右轮的速度,向前为正,向后为负,即SET_BASE_MOTOR(0x40)。底盘会回复此时的左右轮里程计的累计值,即GET_BASE_MOTOR_DATA(0x31)。请注意,无论轮子向前运动或向后运动,里程计的度数均递增,因为slamware core在下发速度的时候,已经区分了向前还是向后。
...