...
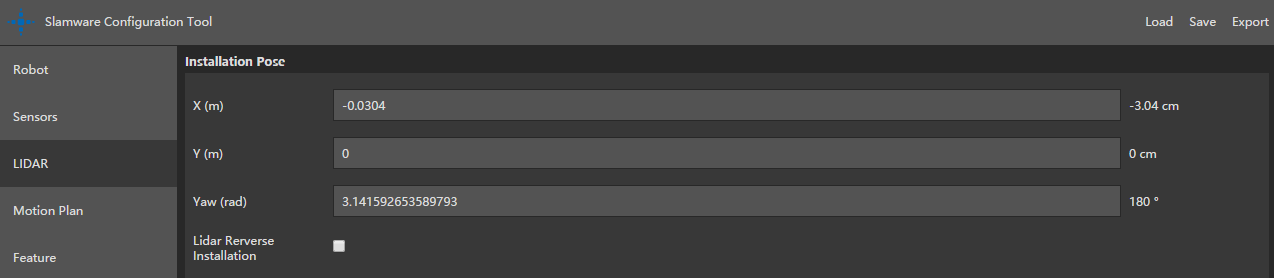
激光雷达如果需要倒置安装(朝下),请勾选Lidar Rerverse Installation。
避障参数设置
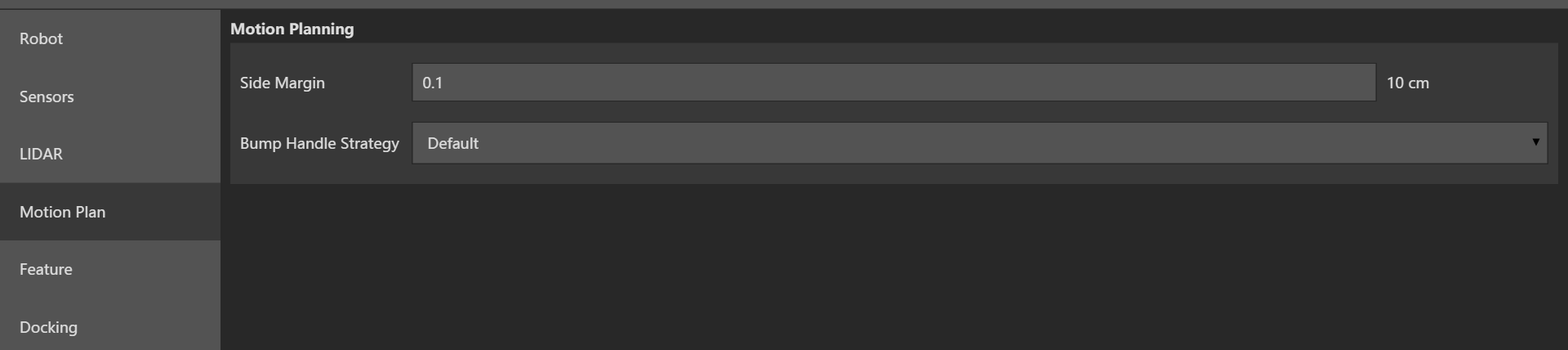
在Motion Plan 页面中,可以对slamware进行避障相关的设置。由于机器人外形不均匀的缘故,避障范围可能不仅限于底盘的范围,side margin用来调节避障范围的大小。避障范围为Robot diameter + 2* side margin直径大小的圆周。
Bump Handle Strategy 设置为Default,即碰撞传感器触发后后退寻路。
Feature 配置
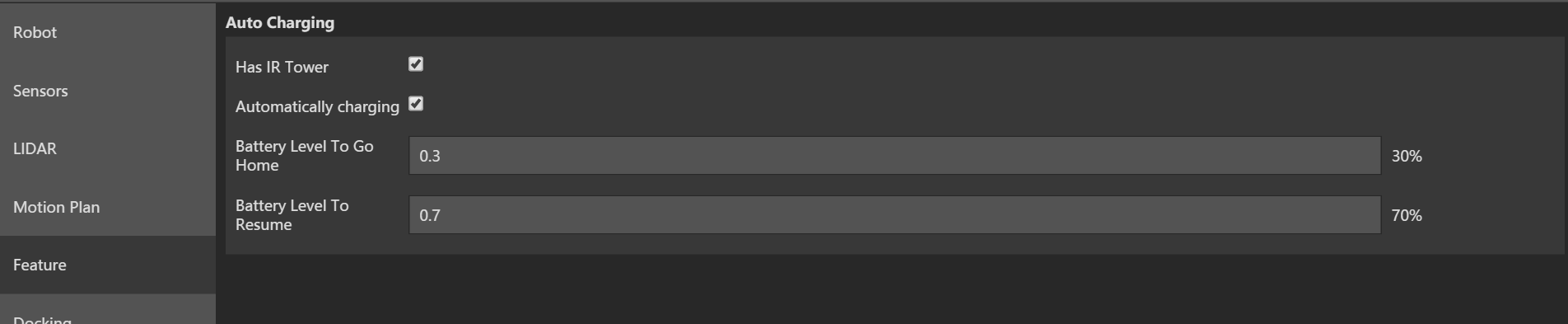
在此页面用户可以配置红外充电相关选项。与运动以及避障无关,可以保留默认设置。如果对以下参数有疑问,请联系思岚技术支持。
Docking 配置
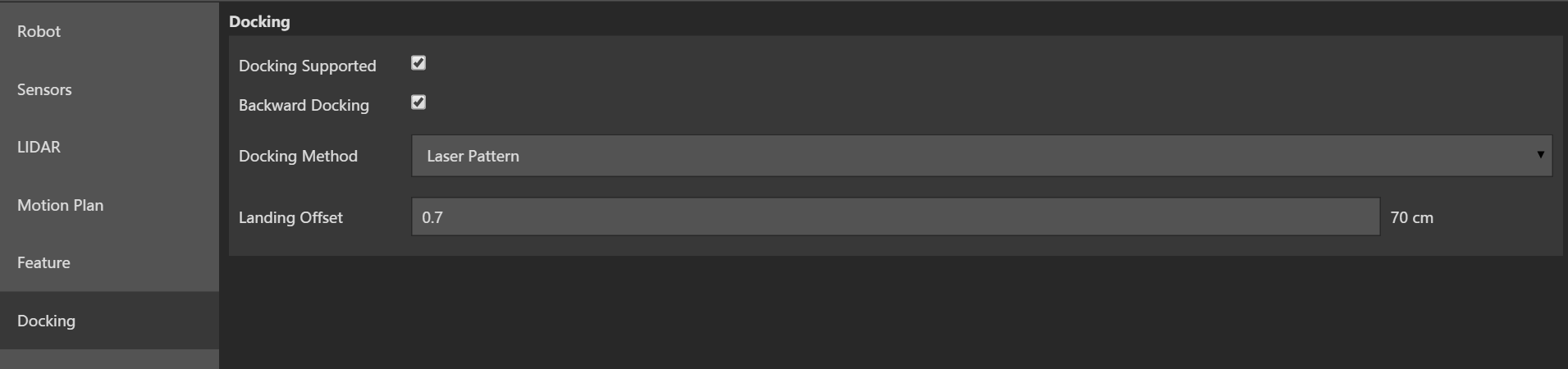
在此页面用户可以配置充电方向等设置。与运动以及避障无关,可以保留默认设置。如果对以下参数有疑问,请联系思岚技术支持。
配置文件保存
全部参数配置好之后,在应用程序的右上角,用户可以对配置进行load, save 以及Export 操作。
...