...
- 开机开始扫地图时,机器人最好面朝一堵直墙,且雷达能扫到尽可能多的有效点。
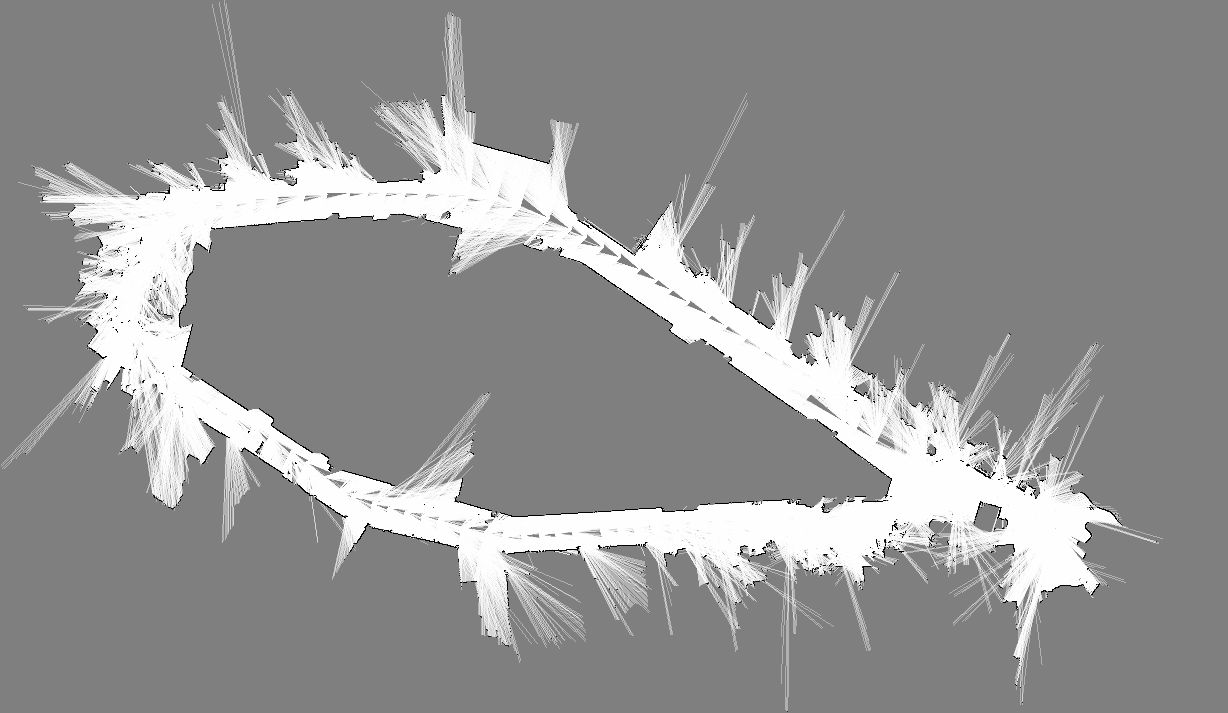
- 大面积建图时,最好能让机器人先去闭环,再去详细扫描环境细节。
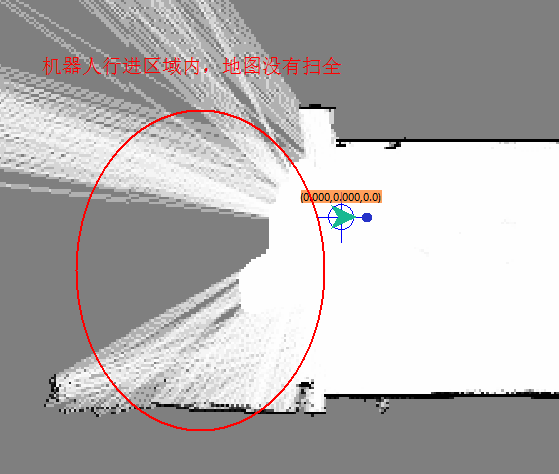
- 擦除未探明的区域
在机器人的行走区域内,可能会出现一些扫图时未完全探明的区域,Robot Studio中此处区域显示为灰色(如下图红圈处所示),如果在此范围内,确实不存在任何障碍物,可以使用白色橡皮擦,将此灰色区域擦除,成为已探明区域。在机器人的行走区域内,可能会出现一些扫图时未完全探明的区域,RoboStudio中此处区域显示为灰色(如下图红圈处所示),如果在此范围内,确实不存在任何障碍物,可以使用白色橡皮擦,将此灰色区域擦除,成为已探明区域。
下图为Robot Studio的工具栏,红圈处为白色橡皮擦:下图为RoboStudio的工具栏,红圈处为白色橡皮擦:
- 用白色橡皮擦来擦除移动物体(人,移动的物体)

- 尽量要保证地图的完整性,在机器可能的行走路径上,所有周围360度的区域,均需要用雷达探明,目的是增加地图的完整性,使得激光匹配的参照点更多。
- 如果地图已经建好,尽量不要在已经建好地图的区域反复来回行走,请尽快保存地图。点击robot studio上面的sync 如果地图已经建好,尽量不要在已经建好地图的区域反复来回行走,请尽快保存地图。点击robostudio上面的sync map按钮,同步地图后保存地图。

如何判断扫好的地图是否达到要求
...