| Excerpt |
|---|
This document introduces the demo project of "recover_localization", how to call the recoverlocalization() API to have the robot re-position to the correct localization on the map. Before using this feature, please note the following: 1.The success rate of relocalization is related to the environment. Before re-positioning, it is recommended to use a clear environmental map with a sharp outline. 2.For the case where there is a similar environment in the map area, for example, there are offices 1 and 2 with the same environment layout on the map, if the robot is actually in the office 1, it may relocate to the office 2 during the relocalization process. . In this case, it is recommended to modify the office environment to make a distinction on the map when building the map (moving tables and chairs, adding pots, etc.). |
Content
| Table of Contents |
|---|
IDE Preparation
Software
- Visual Studio 2010 SP1
- Slamware Windows SDK:Slamware Windows SDK
- RoboStudio(for map display):Robostudio installer
Sample Code:
Info Higher version of Visual Studio will cause errors. sometime you will need to upgrade SP1 package to make your VS compatable with .Net Framework.
Hardware
(Either one of following)
- Slamware SDP mini
- Slamware SDP
- Slamware Kit
- Zeus/Apollo robot base
Download
Compiling
- Right click on "recover_localization" project, set as StartUp project.
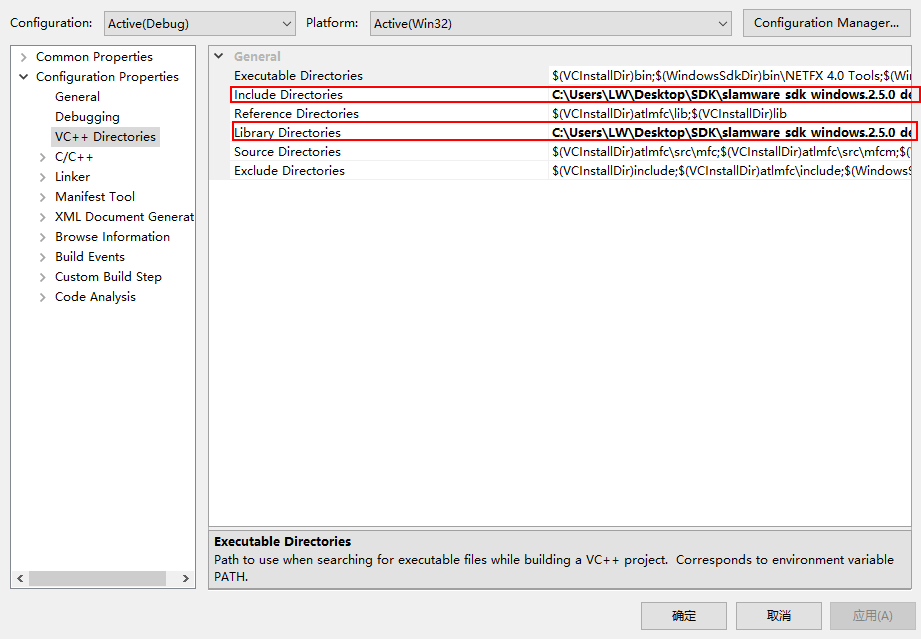
Right click on "recover_localization", then " Properties",configure "include" and "lib" directories to the corresponding folder path of Slamware SDK.
Info Slamware SDK的include和lib目录无需复制到参考例程目录,只需在Visual Studio里指定路径即可。
- Right click on "recover_localization", then "properties",set "Command Arguments" as follows:
Syntax :recover_localization <IP address>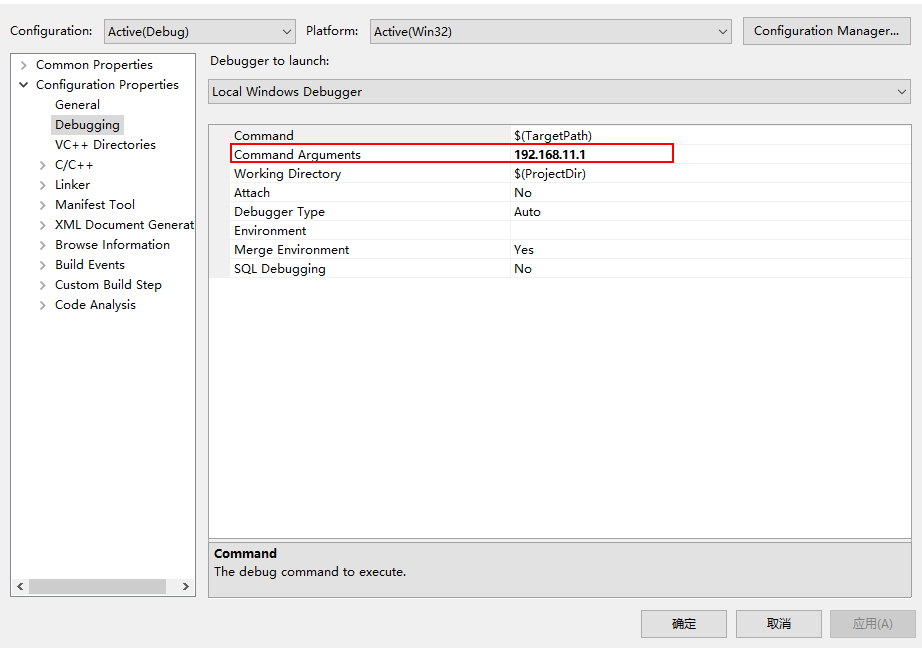
- Click " F5" to execute.
- Robot motion and map could be seen on Robostudio.
Multimedia name recover_localization.mp4
Code
When the actual position deviates from the theoretical position of the map, the demo project will start re-positioning operation. If the recover is successful, you can see in the robostudio that the robot re-positions to the correct position and the status will turn to the corresponding one.
Code Block language cpp firstline 1 title 地图重定位 linenumbers true SlamwareCorePlatform sdp = SlamwareCorePlatform::connect(ip_address, 1445); std::cout <<"SDK Version: " << sdp.getSDKVersion() << std::endl; std::cout <<"SDP Version: " << sdp.getSDPVersion() << std::endl; rpos::actions::MoveAction action = sdp.getCurrentAction(); if (action) action.cancel(); //recover localization by giving an rectangle area; (0,0,0,0) represents the entire map area. action = sdp.recoverLocalization(rpos::core::RectangleF(0,0,0,0)); while(true) { switch (action.getStatus()) { case rpos::core::ActionStatusError: std::cout << "Action Failed: " << action.getReason() << std::endl; break; case rpos::core::ActionStatusRunning: std::cout <<"Current status: Running" << std::endl; break; case rpos::core::ActionStatusFinished: std::cout <<"Current status: Finished" << std::endl; break; default : std::cout <<"Status Unknown" << std::endl; break; } }