此文档为RPLidar-Mcu测试工程说明文档
此工程基于STM32F103RB-Nucleo开发板,STM32Cube_FW库编写,IDE为IAR7.60.
Nucleo开发板详细资料, 请参阅这里。
STM32Cube_FW说明文档,请参阅这里。
连接方式如下图所示:
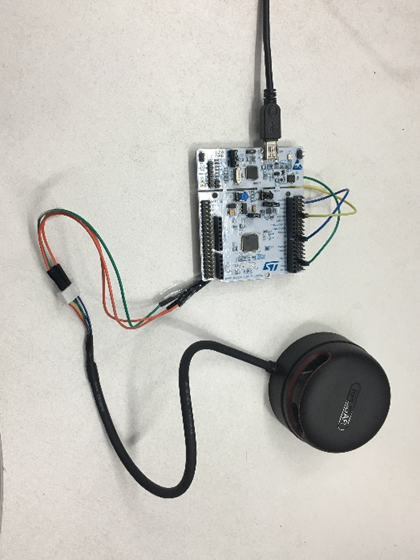
RPLidar-A2的5个引脚定义,其中RX,TX,GND三个引脚接入STM32F103RB-Nucleo开发板的串口,下图中接线为接入Usart1。此处为了测试方便,将VCC和Motorctrl两脚都接入5V电压,后续应用到工程中,可以考虑用STM32的定时器提供RPLidar所需要的PWM信号。
(注:STM32开发板上的5V引脚由于供电能力不足,RPLidar启动至少需要0.5A电流,所以测试中是利用一个串口转USB的开发板接入电脑供电)。

此工程中实现从STM32开发板串口1获取雷达数据,并从串口2转发到电脑端显示。
工程中已经加入了发送开始扫描命令的步骤,A5 20 (scan命令)。
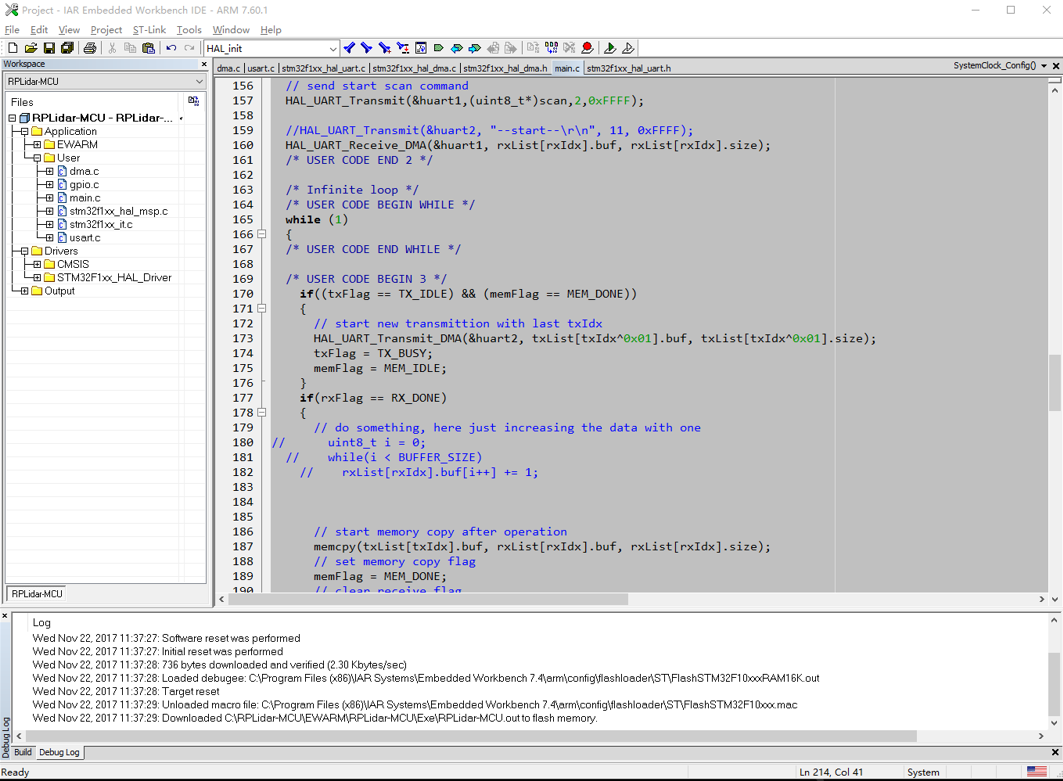
将此工程通过STM32开发板自带的ST-link烧录到开发板后,将雷达的VCC和Motorctrl开始正常供电后,可按开发板的复位按钮,工程即开始工作,通过打开串口助手来监视所获得的数据。
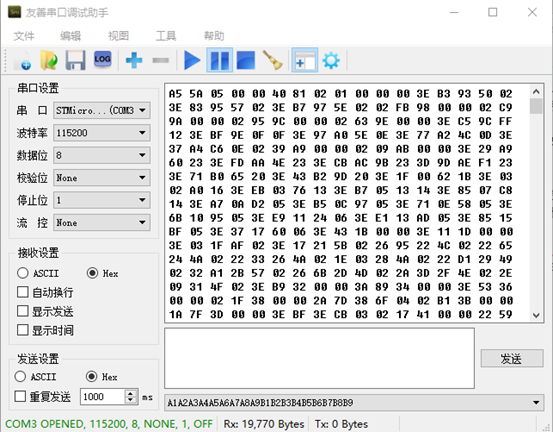
在串口助手中可以看到通过stm32透传得到的数据,起始应答A5 5A 05 00 00 40 81已经正确收到,后面每5个字节代表了一个点的距离角度等信息,具体可按照RPLidar通讯协议解析。
RPLidar通讯协议请参阅这里。